Collision Detection
Any new target can be added to the PRM roadmap without having to regenerate the entire map. This means that the roadmap only needs to be completely regenerated if new objects are added to the workspace or existing objects are moved around.
When a new target is added to the roadmap, the PRM algorithm will attempt to connect it to a number of existing points already within the roadmap with a set of new edges. It is possible to set a different default number of edges for new targets than the number chosen for the initial roadmap construction.
The maximum number of edges for new targets can be set using the following process
1.Open the Collision-free motion planner panel by either going to the Utilities menu➔Collision-free motion planner➔Create collision-free map or click on the small arrow next to ![]() Check collisions and select Create collision-free map.
Check collisions and select Create collision-free map.
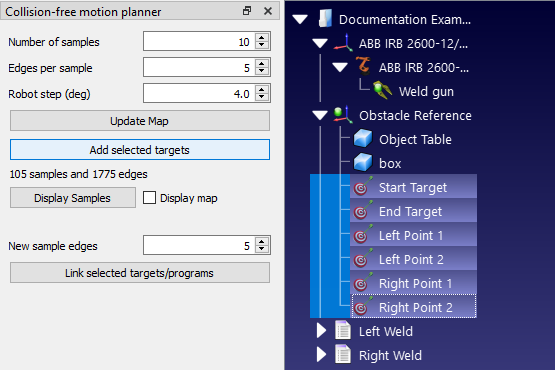
2.Enter the number of edges in the box labeled New sample edges. The default is 5.
There are two ways to add new targets to the roadmap:
1.Select the targets in the station tree. Multiple adjacent targets can be selected at once by clicking on the highest target, holding the Shift key, and then clicking on the lowest target. Multiple non-adjacent targets can be selected by holding the Ctrl key. Then click Add selected targets in the Collision-free motion planner panel.
2.Simply use the same method to Link selected targets or Link selected programs described in the previous sections (Link Targets and Link Programs). Any target which is not already present in the roadmap will be added automatically.