Collision Detection
You can enable automatic collision avoidance for robot machining projects. RoboDK will automatically rotate the tool to find a collision-free path.
Follow these steps to activate automatic collision checking and collision avoidance for robot machining projects:
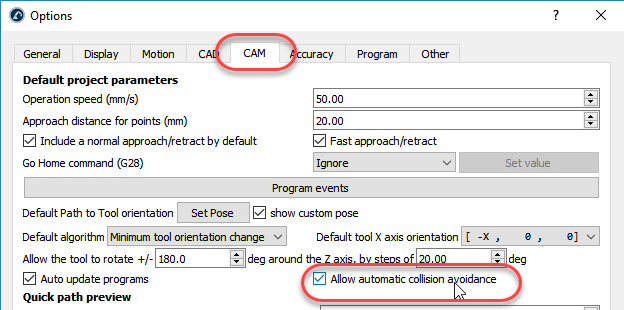
1.Select Tools➔Options➔CAM
2.Check Allow automatic collision avoidance
3.Double click your robot machining project, 3D printing, curve follow or point follow project.
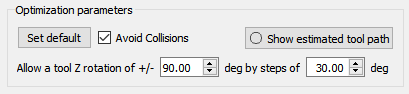
4.Check Avoid collisions: this will activate automatic collision avoidance by changing the tool orientation around the Z axis as described in the optimization parameters.