Collision Detection
You can specify if the interaction between any pair of objects needs to be checked for collisions.
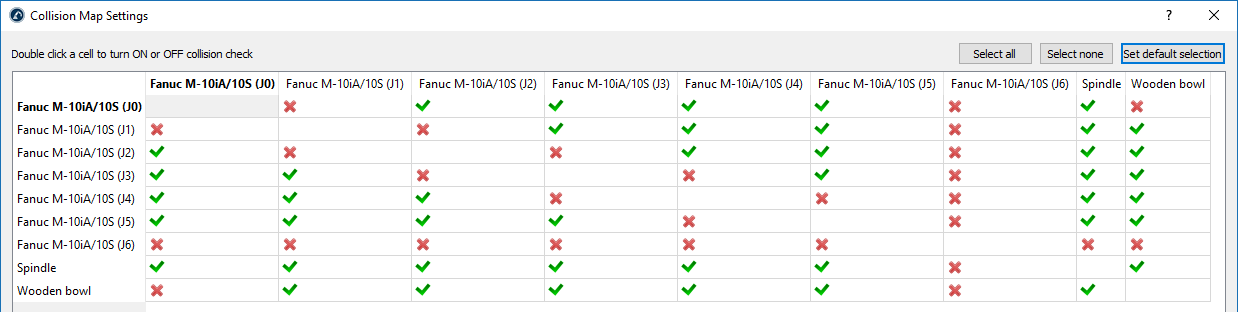
Select Tools➔![]() Collision map to display the relationship between all moving objects in your cell and the collision check state. Double click a cell to activate or deactivate collision checking for that relationship. Select Set default selection to automatically set up a conservative selection.
Collision map to display the relationship between all moving objects in your cell and the collision check state. Double click a cell to activate or deactivate collision checking for that relationship. Select Set default selection to automatically set up a conservative selection.
By default, RoboDK checks collisions between all moving objects in the station, including all robot links, objects and tools. As an exception, consecutive robot joints are not checked for collisions as they may always in contact.