Collision Detection
The "query phase" of the motion planner is accessed when two targets or programs are linked together.
To link two targets, first select them in the station tree. There are two ways to select and link the targets:
1.With the Ctrl key:
a.Left click on the target which is to start the movement (in the example, the target named "Start Target").
b.Hold down the CTRL key.
c. Left click on the destination target (e.g. "End Target")
d.Right click on either of the two targets and select Link selected targets. Alternatively, if the Collision-free motion planner panel is open, click on the Link selected targets/programs button.
2.With the Shift key:
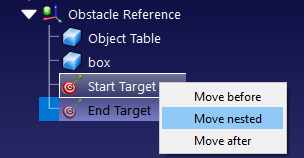
a.Arrange the two targets one above the other in the station tree, with the start target above the end target. A target can be moved around the tree by drag-and-dropping it using the right mouse button. Dropping the target will reveal a menu to choose where the target should be located.
b.Left click on either target.
c. Hold down the Shift key.
d.Left click on the other target.
e.Right click on either of the two targets and select Link selected targets. Alternatively, if the Collision-free motion planner panel is open, click on the Link selected targets/programs button.
Both methods will generate a new program which links the two targets using the saved roadmap. To create a movement in the opposite direction, select the targets in the opposite order — i.e. by selecting End Target before Start Target using the Ctrl method, or rearranging the targets in the station tree for the SHIFT method.