Robot Machining
Each robot has a default post processor associated with it that should generate valid code for your robot controller. You can easily change the program output depending on the robot controller you use.
Follow these steps to change the post processor:
1.Right click on a program or a robot.
2.Select Select Post Processor to change the post processor.
This setting will apply to all programs using the same robot.
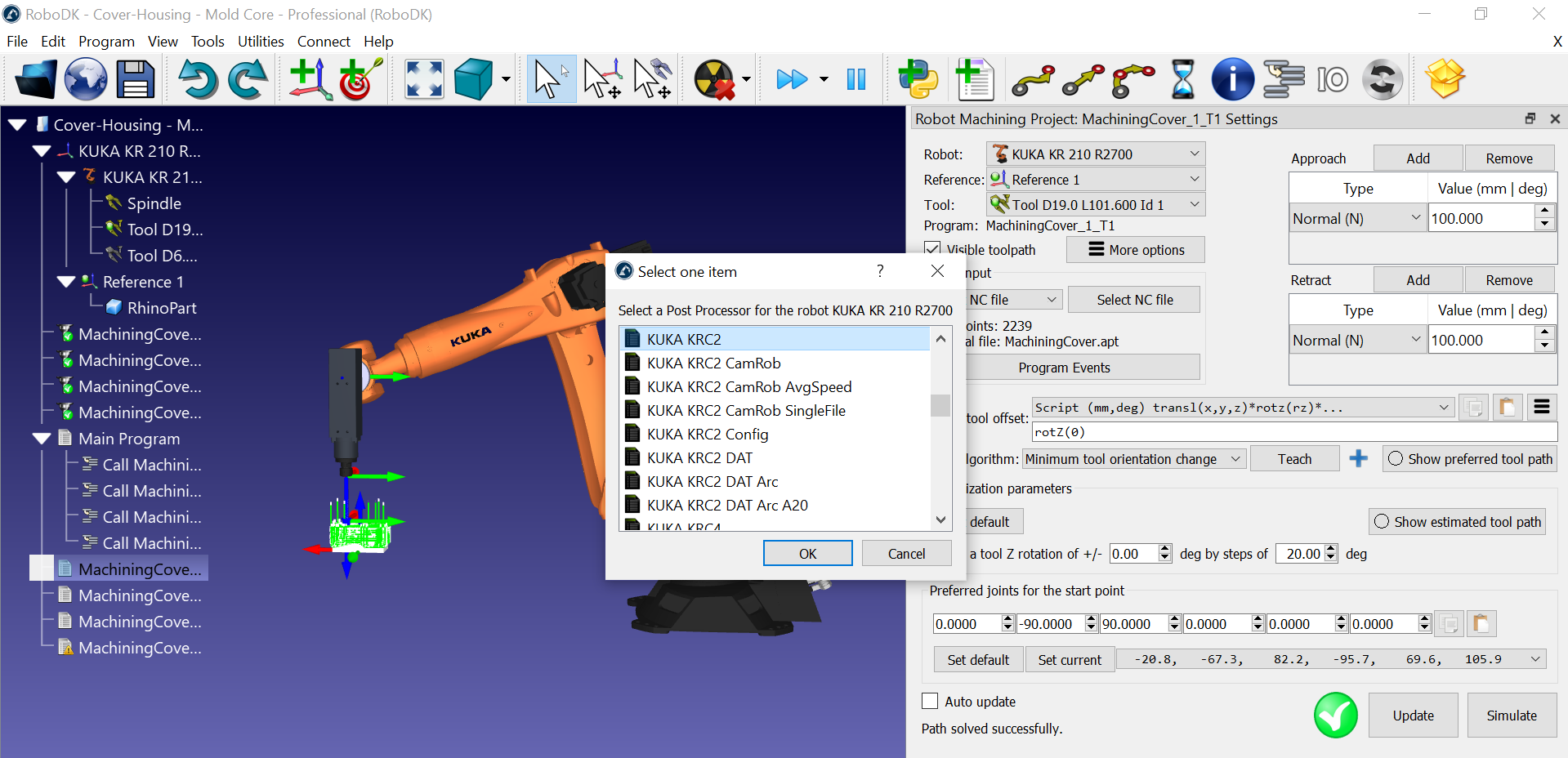
If you have a KUKA robot, you should see the KUKA KRC2 post processor selected by default. This should be compatible with KUKA KRC4 controllers as well. If you prefer, you can still select the KUKA KRC4 post processor if you have a KRC4 controller.