Robot Machining
Most machining or manufacturing operation involve a 5 axis constrain. While the position of the tool (TCP) and the cutting axis is defined, you have an additional degree of freedom to define when you use a 6-axis robot arm. This degree of freedom allows us you to turn around the cutting axis and automatically avoid singularities and axis limits.
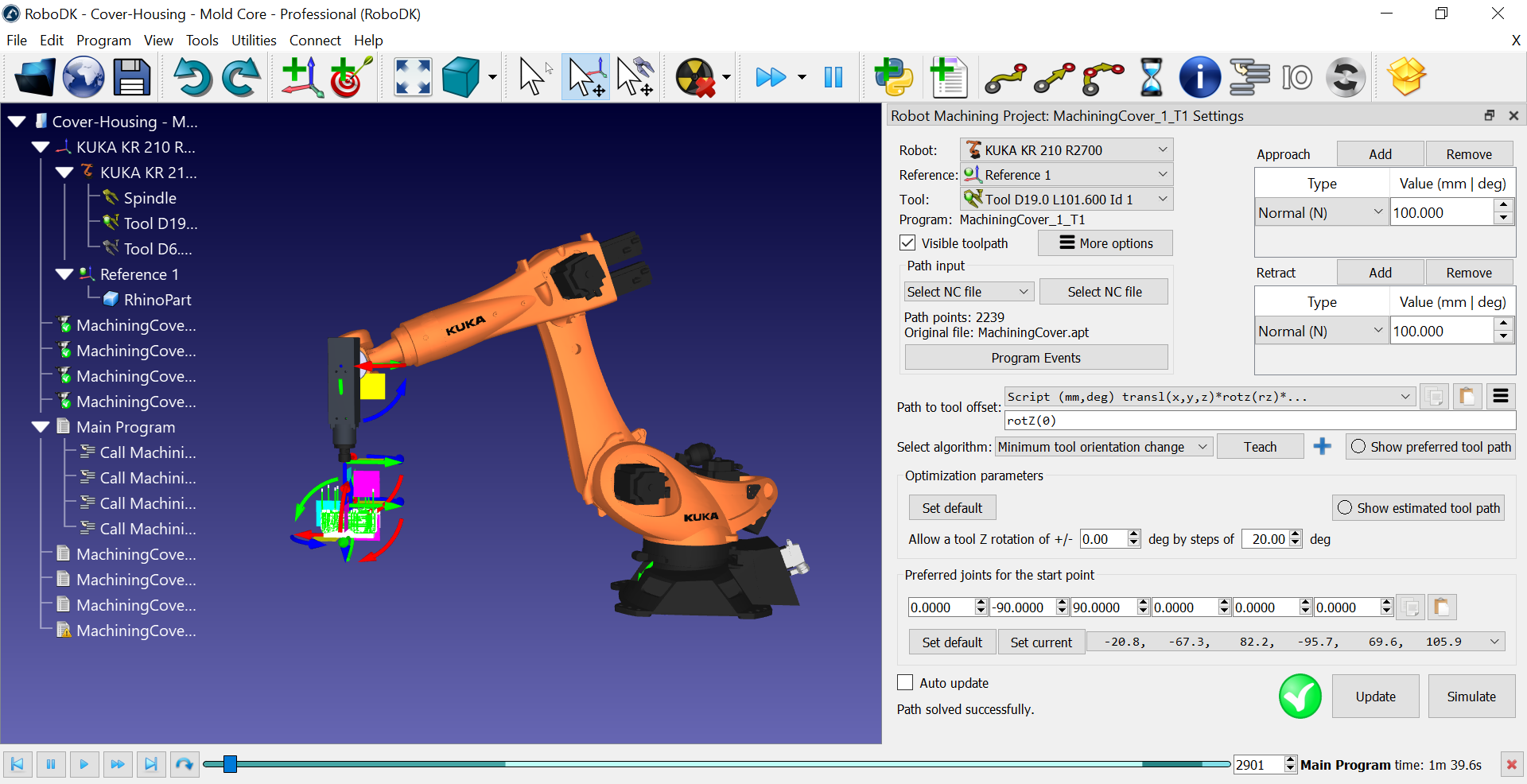
The easiest way to customize the tool orientation is by selecting the Teach button in the robot machining project. By selecting Teach, you are telling RoboDK you want to follow the current tool orientation so the settings will adjust to match that orientation.
By selecting Show preferred tool path we can preview the tool orientation the robot is trying to follow.
You can select Update and Simulate to see the result.
The optimization parameters allow the robot to automatically change the tool orientation if the robot can't achieve the preferred orientation. This parameter is important if you have a large part, if you are working near a singularity or near the limits of the robot workspace. If you see a red mark it means the robot cannot perform the operation.
If you select Show estimated tool path you should see in green the positions that are reachable. It will give you a hint about what the orientation will look like to make the path feasible. This means we are using the additional degree of freedom to automatically avoid robot singularities and axis limits.