Robot Machining (5x)
You can easily customize the tool orientation along your robot machining program by teaching the preferred orientation.
In this example, we could improve the tool orientation for last 2 machining operations:
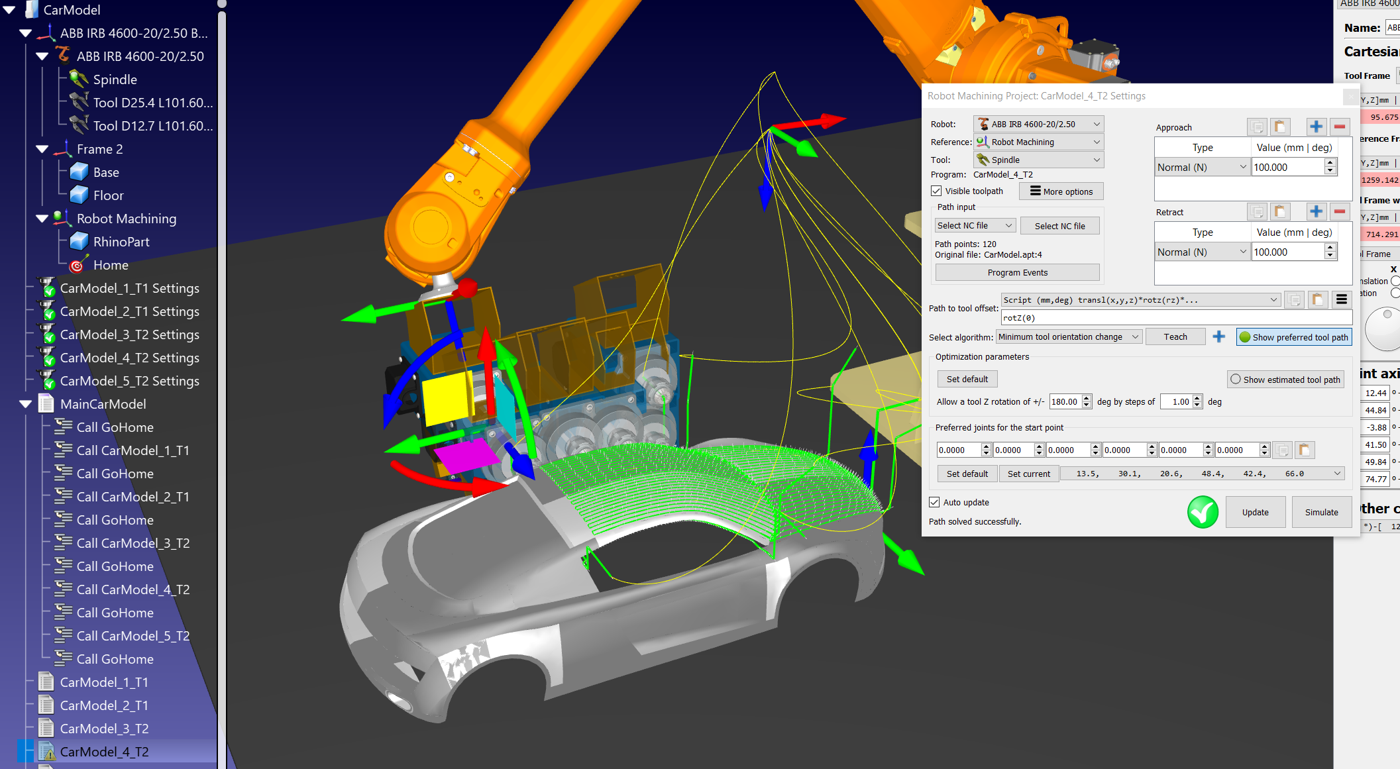
1.Double click the 4th machining operation to open the robot machining settings for that operation.
2.Select Simulate or run the corresponding program and stop the robot in a point along the machining path.
3.Select the Show preferred tool path button to see the tool orientation that RoboDK will try to make the robot follow.
4.Hold the Alt key to grab the robot tool and grab the blue round arrow rotate around the Z axis of the tool. Move the tool orientation to an orientation you want to follow.
5.Select Teach in the robot machining menu to account for that orientation along the path. By selecting Teach, you are telling RoboDK you want to follow the current tool orientation so the settings will adjust to match that orientation.
6.Select Update to recalculate the path.
Select Simulate to run the simulation (or double click the generated program).
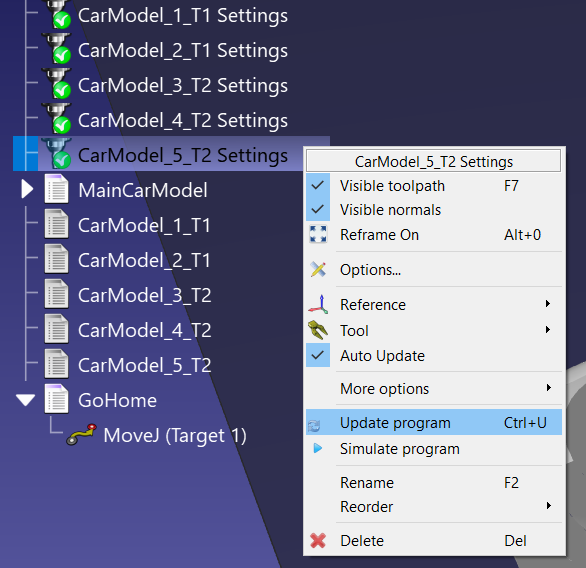
7.If the result gives you what you expected, you can copy the settings and paste them in another toolpath: Right click the robot machining settings and select Copy settings. Then, right click the new robot machining settings and select Paste settings. Right click again this last robot machining project and select Update program to update the program associated with this robot machining job.