This section shows how you can create a new cell
You can follow these steps to build a new robot cell for robot machining.
1.Select File➔New Station.
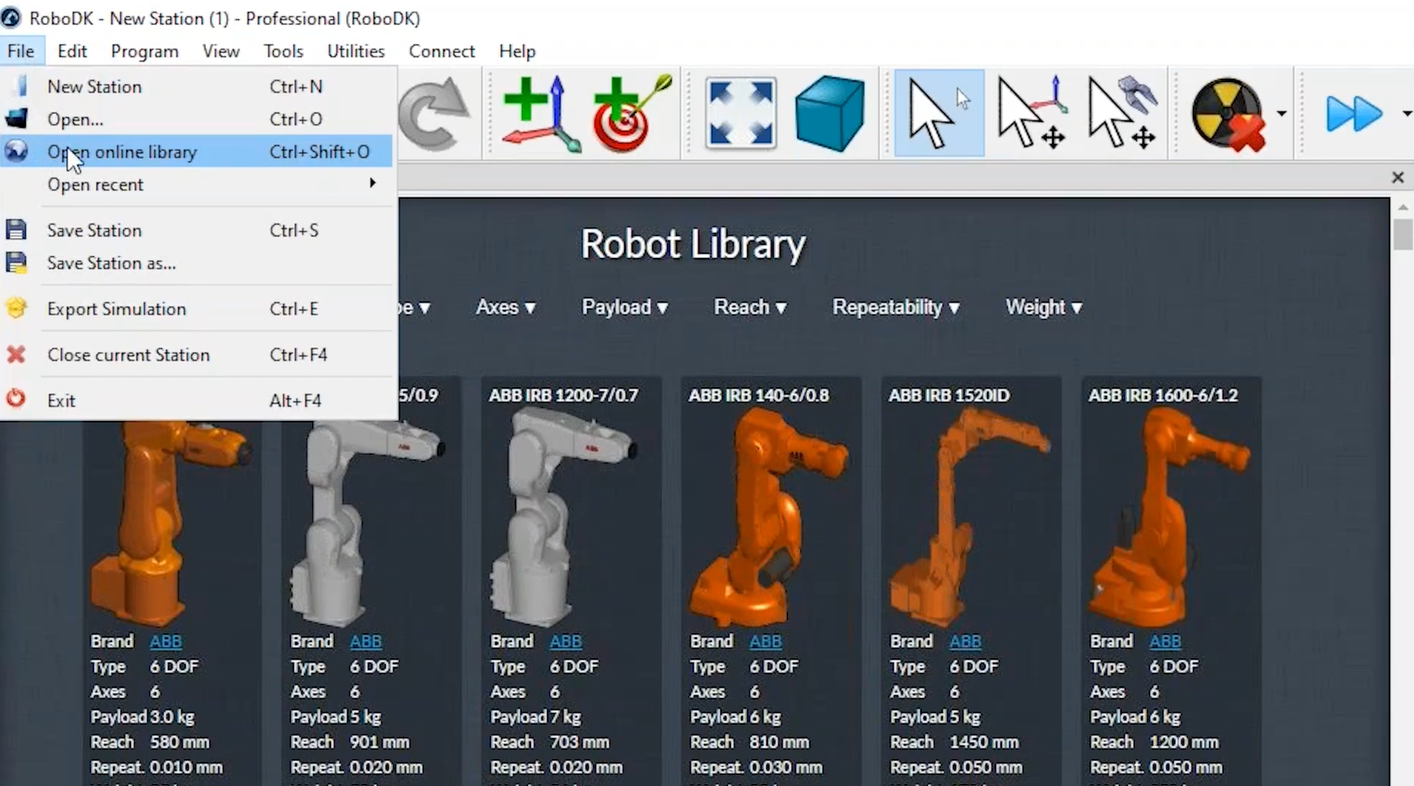
2.You can access the library by selecting File➔Open online library.
![Example 5 Axis Robot Machining - Image 4]()
3.Once you find your robot, select Download to open the robot in your project.
Note: Each robot will be loaded with its own robot base as a coordinate system.
Tip: You can also load 3D models such as STEP, IGES, STL files among other formats. To open a new file you can drag and drop them in RoboDK or select File➔Open. More tips on how to build your RoboDK project are available in the getting started section. Tip: Once you have created a robot machining project you can easily replace a robot by right clicking on the robot and selecting Replace robot. You can then choose a robot you have in your library. This method is easier than rebuilding the whole cell and establishing the links again.