Laser Cutting
Open your 3D object in Fusion 360. In this example the 3D object is a stamped piece of metal.
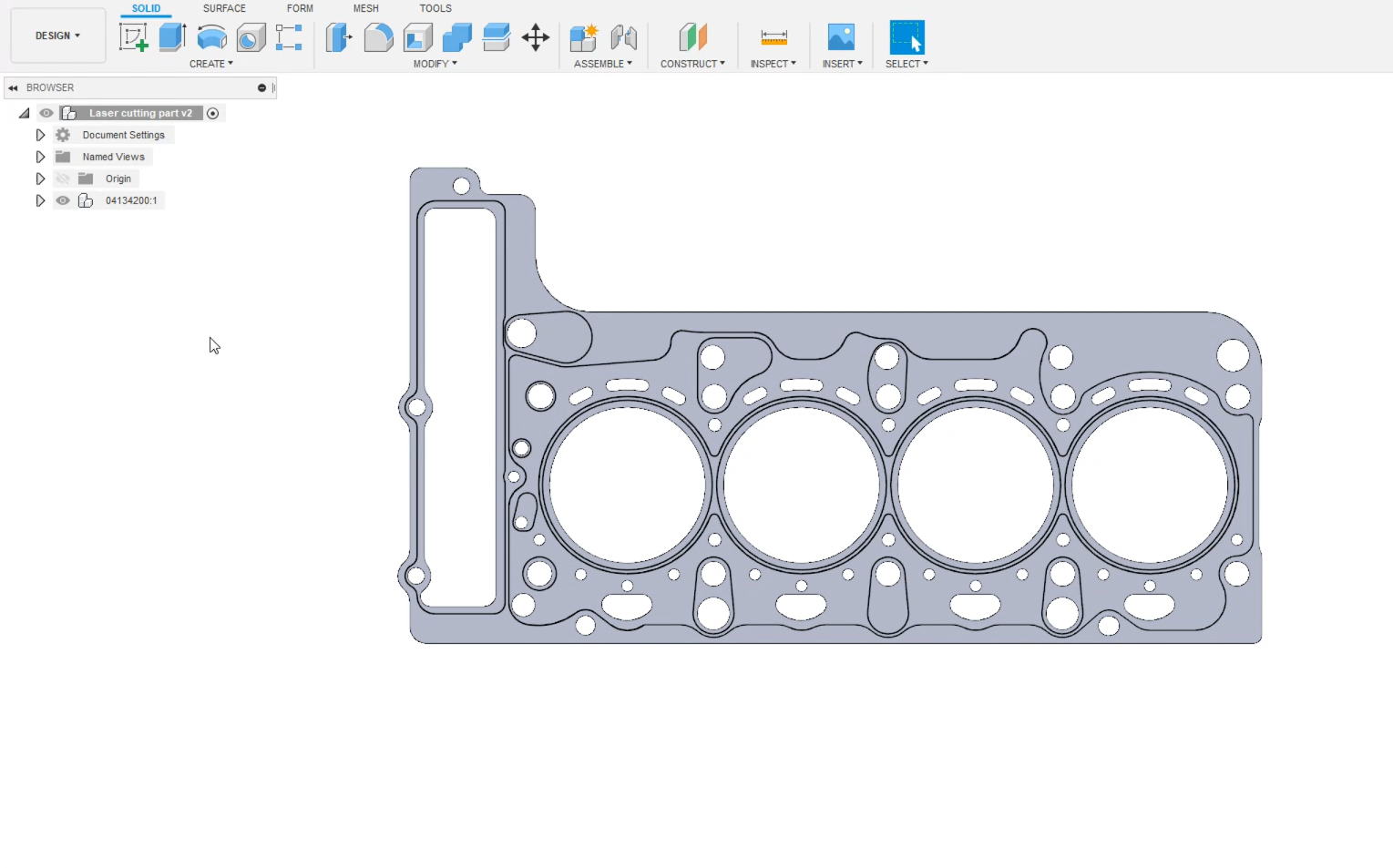
The goal of this project is to automatically create a robot program that will cut all those holes with a leaser cutter. Programming that by hand would take too long.
1.Select the Design section of Fusion in the top left-hand corner.
2.Select the Tools tab. This is where you will find the RoboDK plugin.
3.Click on the button ![]() to load the part to RoboDK.
to load the part to RoboDK.
The part has been imported in the active reference frame of your RoboDK station. Make sure that the part has been imported in the right orientation. In this example, you will have to modify the orientation of the part.
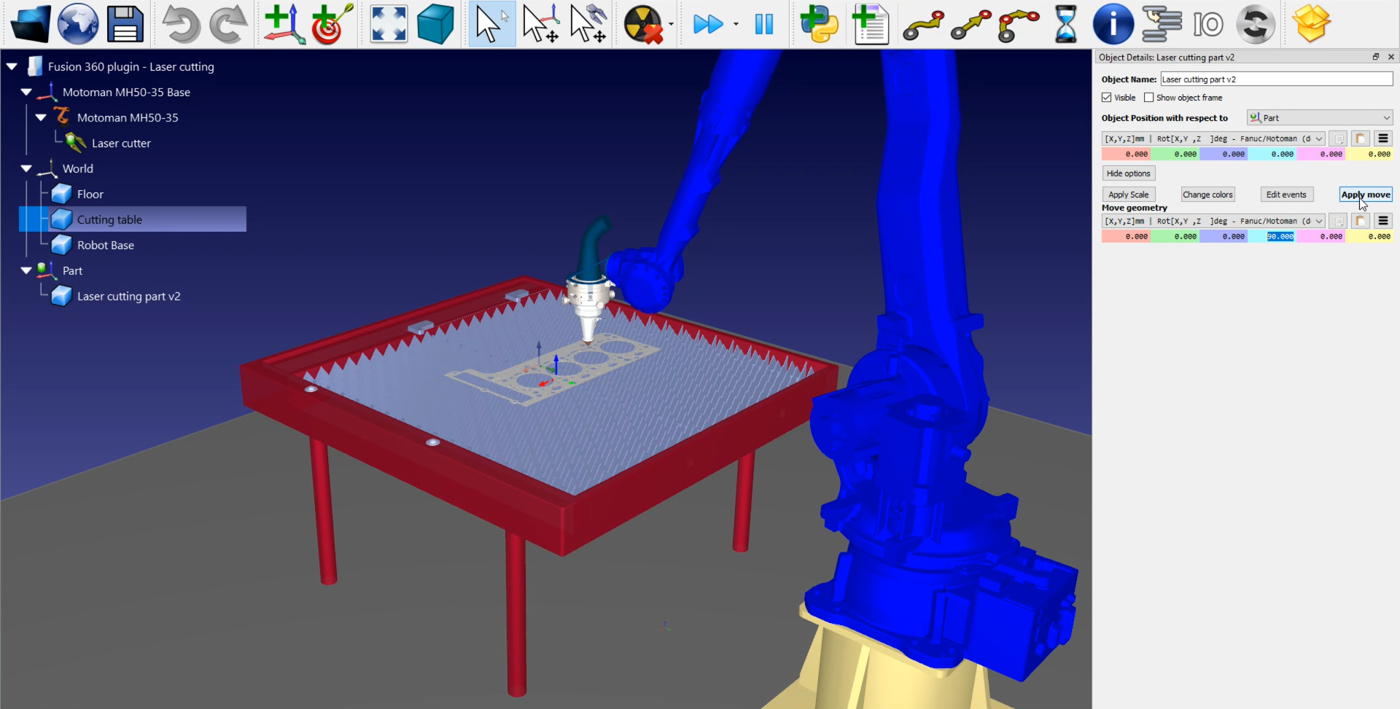
Follow the next steps to modify the orientation of your part:
1.Double click the ![]() Laser cutting part. In this example the part is called Laser cutting part v2.
Laser cutting part. In this example the part is called Laser cutting part v2.
2.Click on More options in the open menu.
3.Go to Move geometry and enter 90 in the X axis (light blue) as shown in the image above.
4.Click on Apply Move to save the orientation.
The RoboDK plugin has another feature in Fusion 360 that will help you import your cutting path to RoboDK.
1.Go back to Fusion 360.
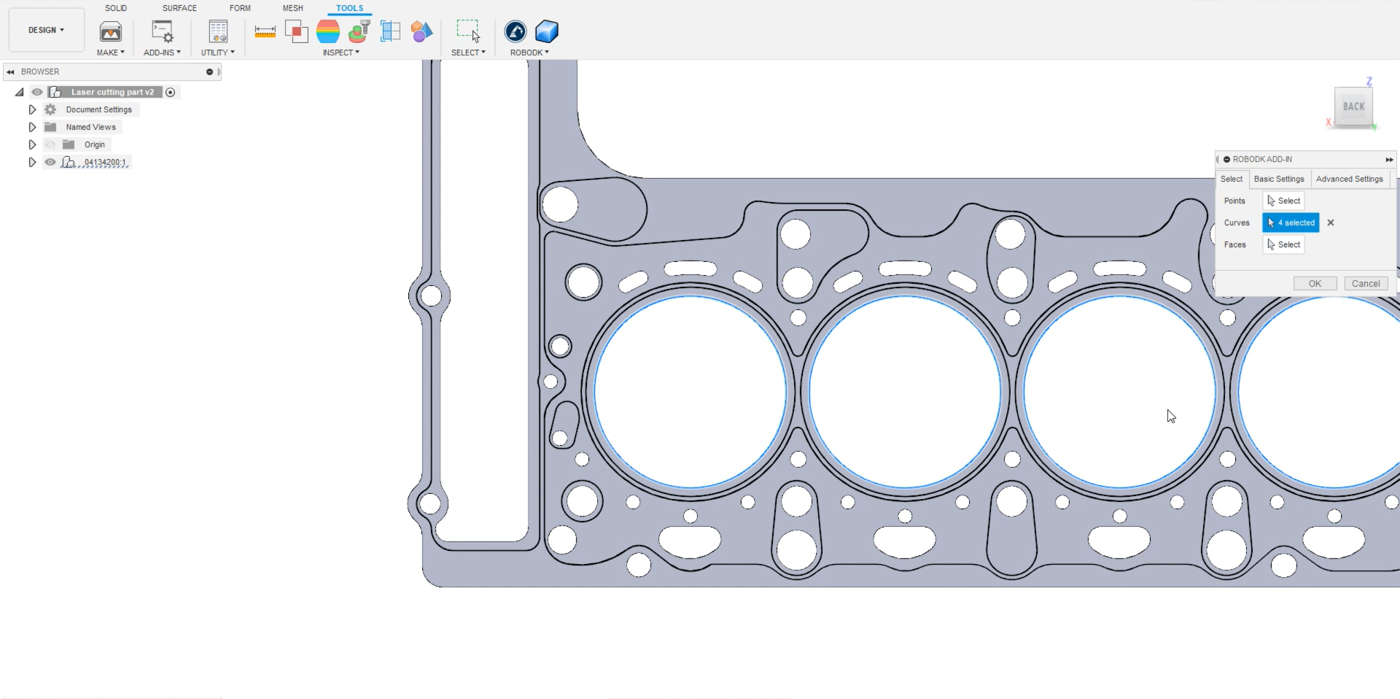
2.In the RoboDK plugin menu, select Load Curve(s).
3.Select Curves in the open menu.
4.Select the edges of the four big circles as shown in the image below.
Now you will need to give RoboDK an orientation for the robot tool.
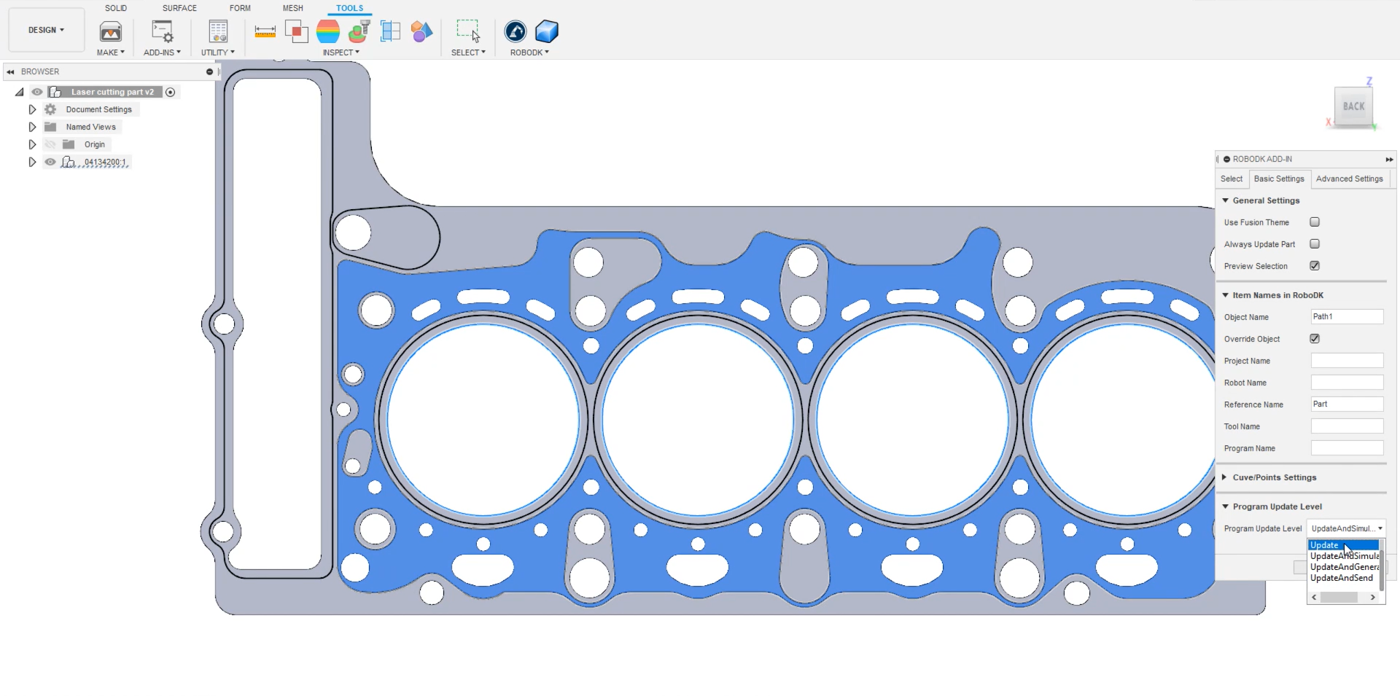
1.Select Faces in the open menu.
2.Select the faces you wish the tool to be normal to as shown in the image below.
Now you can configurate the settings:
1.In the same menu, go to Basic Settings.
2.Uncheck the Use Fusion Theme if you prefer to keep RoboDK in its default behavior.
3.Enter an Object Name to name your path. In this example it will be Path 1.
4.Enter a Reference Name you want it to be exported in. In this example it is named Part, the same as in the RoboDK station.
5.Select Update in the Program Update Level to have more options afterwards as shown in the image above. This is optional.
6.Click on OK.
You should now be able to see the imported path in RoboDK. In this example, the orientation is wrong again and you will need to modify the orientation as you did for the part before.
1.Double click your path, in this example it is ![]() Path 1.
Path 1.
2.Click on More options in the open menu.
3.Go to Move geometry and enter 90 in the X axis (light blue).
4.Click on Apply Move to save the orientation.
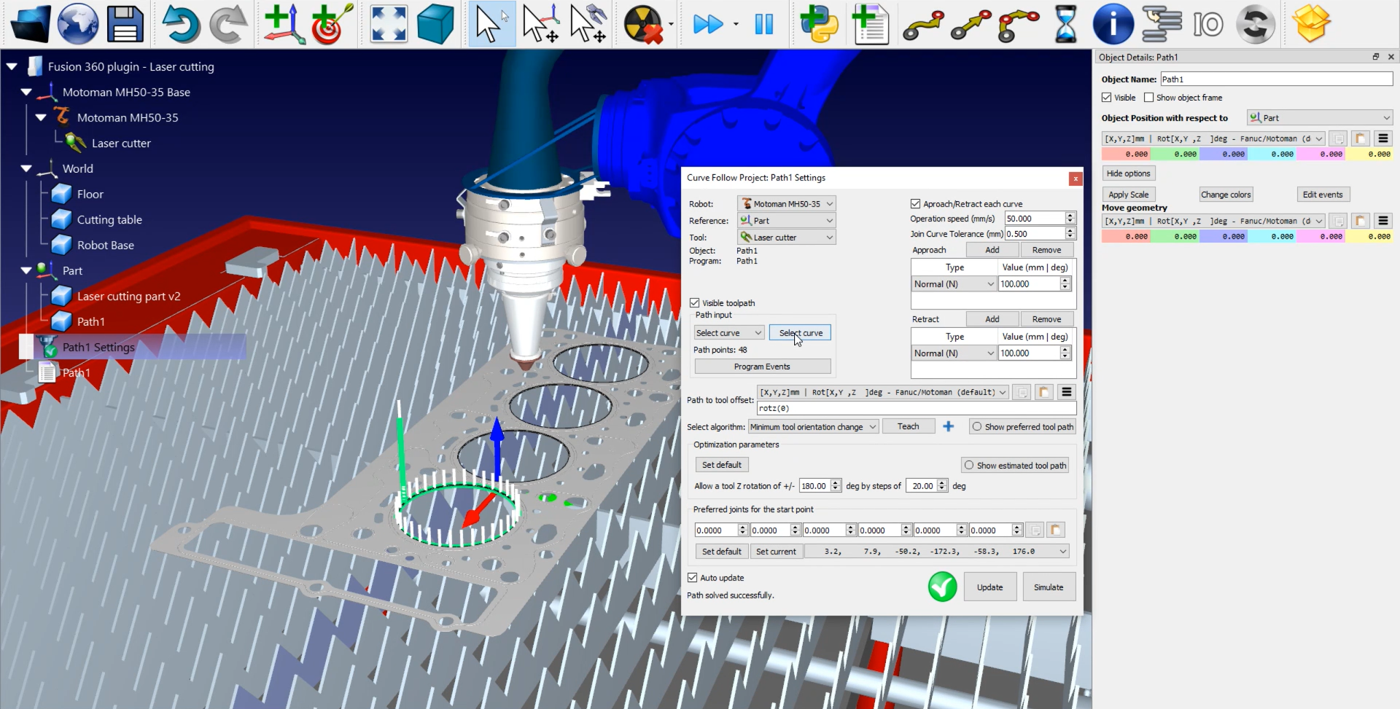
The next step is to verify if the order in which the path sections will be executed is correct by selecting ![]() Path1 Settings➔ Update ➔Simulate. In this example, only one of the four circles has been selected as shown in the image below.
Path1 Settings➔ Update ➔Simulate. In this example, only one of the four circles has been selected as shown in the image below.
1.Double click on your path settings, here ![]() Path1 Settings.
Path1 Settings.
2.Make sure the that the robot, the reference, and the tool are the right ones.
3.Click on Select curve.
4.Select the other circles.
5.Click ![]() Done.
Done.
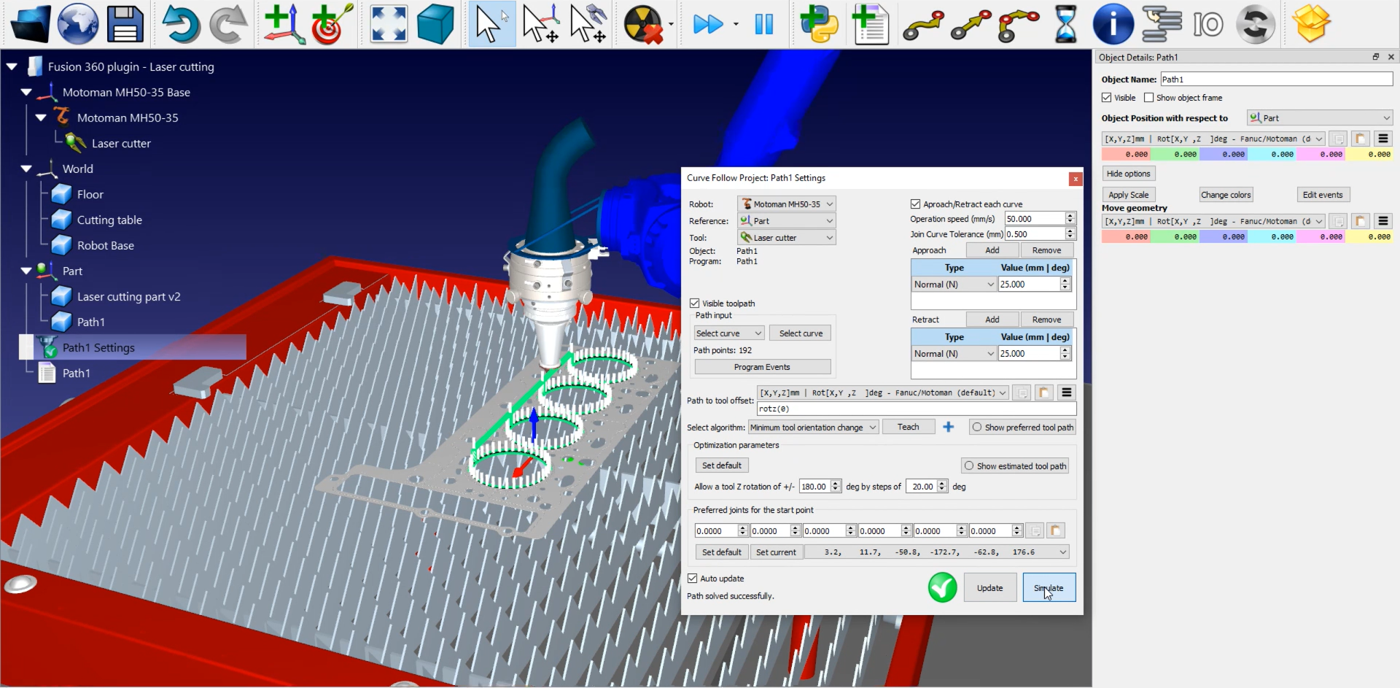
You can now notice that the approach and retract movements are a bit too long in terms of length.
You can easily modify those values by:
1.Double click on your path settings, here ![]() Path1 Settings.
Path1 Settings.
2.Enter a smaller value in the Approach and Retract boxes. In this example, you can enter 25mm.
3.Click on Update➔Simulate.
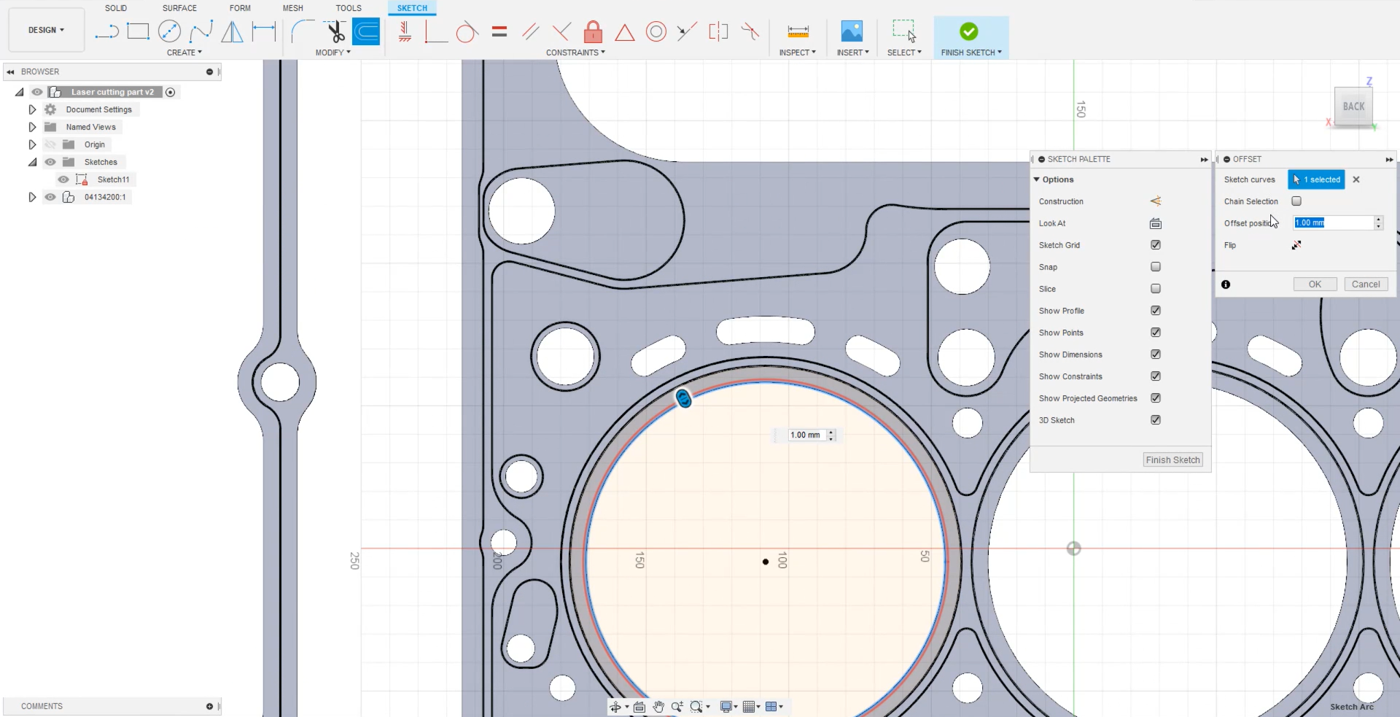
The next step is to consider the radius of the laser. In this example, the laser is cutting too much material.
How to set up your laser radius:
1.Go back to Fusion 360.
2.Got to the tab Solid➔Create Sketch to create your sketch.
3.Select one circle and click on Offset in the top menu to create a new path.
4.Considering that the diameter of the laser beam is 2mm, the radius will be 1mm. Enter 1 in the Offset position box as shown in the image below.
5.Repeat those steps for the 3 other circles.
6.Click Ok.
You can now load the curves into RoboDK.
1.Go to the Tools tab.
2.Click on RoboDK➔Load Curve(s).
3.Select Curves and click on the sketch in each circle.
4.Select Faces and click on the face you wish the tool to be normal.
5.In this example, the Object Name (Basic Settings) is Path2.
6.Click Ok to import the path into RoboDK.
You can modify the orientation of Path2 as explained above. If you come closer, you can see the difference between the two paths. You can now delete the Path1.
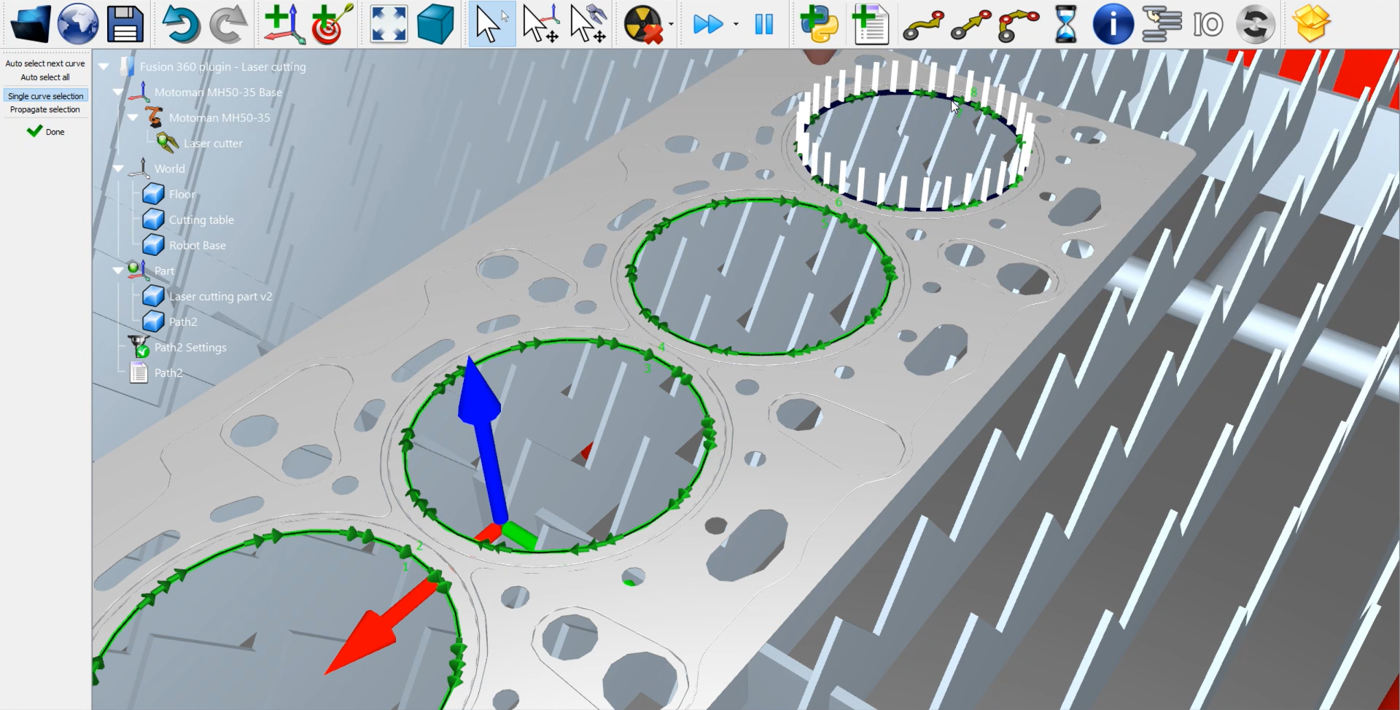
The next step is to verify if the path sections you loaded are correct by:
1.Selecting![]() Path2 Settings➔Update to make sure that the path is at the right position.
Path2 Settings➔Update to make sure that the path is at the right position.
2.Click on Select curve and select the other circles as shown in the image below.
3.Select ![]() Done.
Done.
You can reduce the size oh the Approach and Retract movements as explained above. In this example, you can enter again 25mm. Don’t forget to Update➔Simulate your Curve Follow Project to save your settings. You could do the same steps for all other holes of this part.
This way of building a laser cutting program works for RoboDK’s Fusion 360 plugin, but it also works for all the CAD plugins.