General Tips
This example shows how to model a 2-axis linear rail, also known as a linear axes or linear track. Linear axes are used to extend the reach of robot arms.
Follow these steps to set up your 3D model in RoboDK:
1.Import your 3D model into RoboDK ➔ drag and drop the STEP file into your station.
2.Open the Mechanism builder: Utilities ➔ Model Mechanism or Robot.
3.Under Robot Type, select 2-linear axes (T-bot).
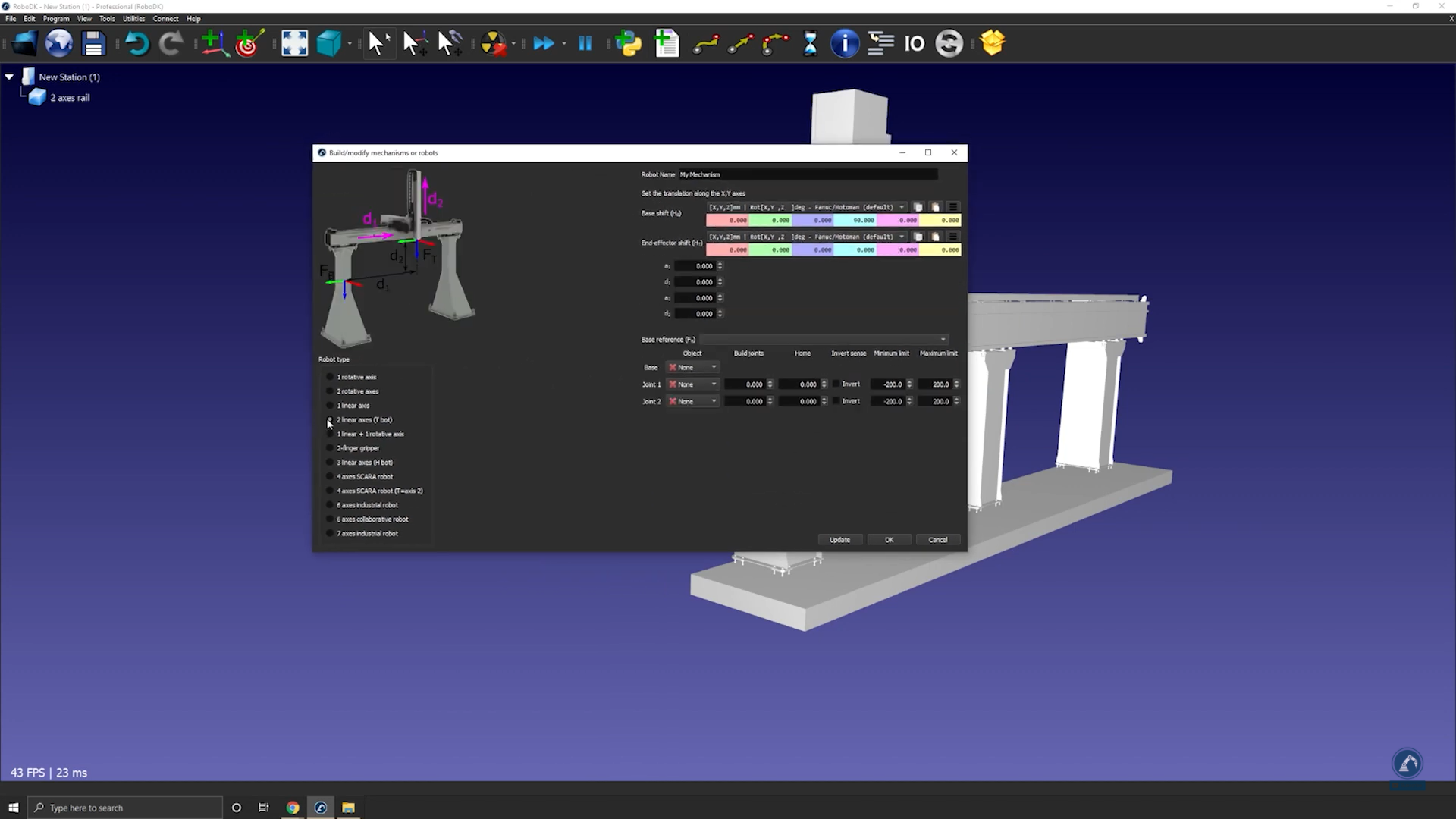
4.Once your model is split into 3 pieces, re-open the rail builder: Select Utilities ➔ Model Mechanism or Robot.
5.Select the option: 2-linear axes (T-bot).
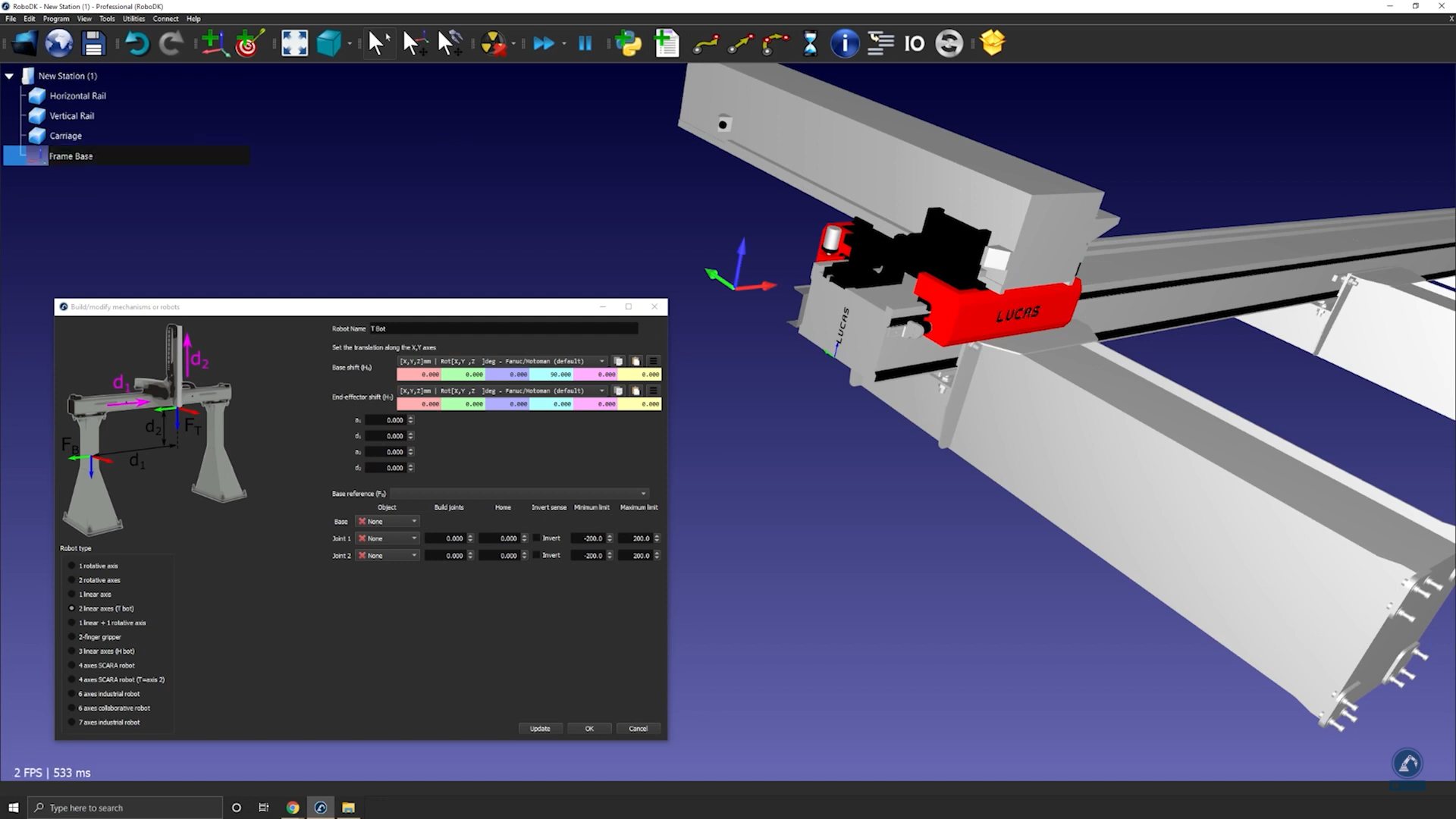
6.Rename your robot to T-bot (under robot name).
Follow these steps to find the location of your base frame:
7.If you consider that your base frame should be at the 0 position of the rail, create your reference frame exactly there and rename it to Frame Base.
Follow these steps to modify the position of the frame:
8.Open the frame panel by double clicking the frame.
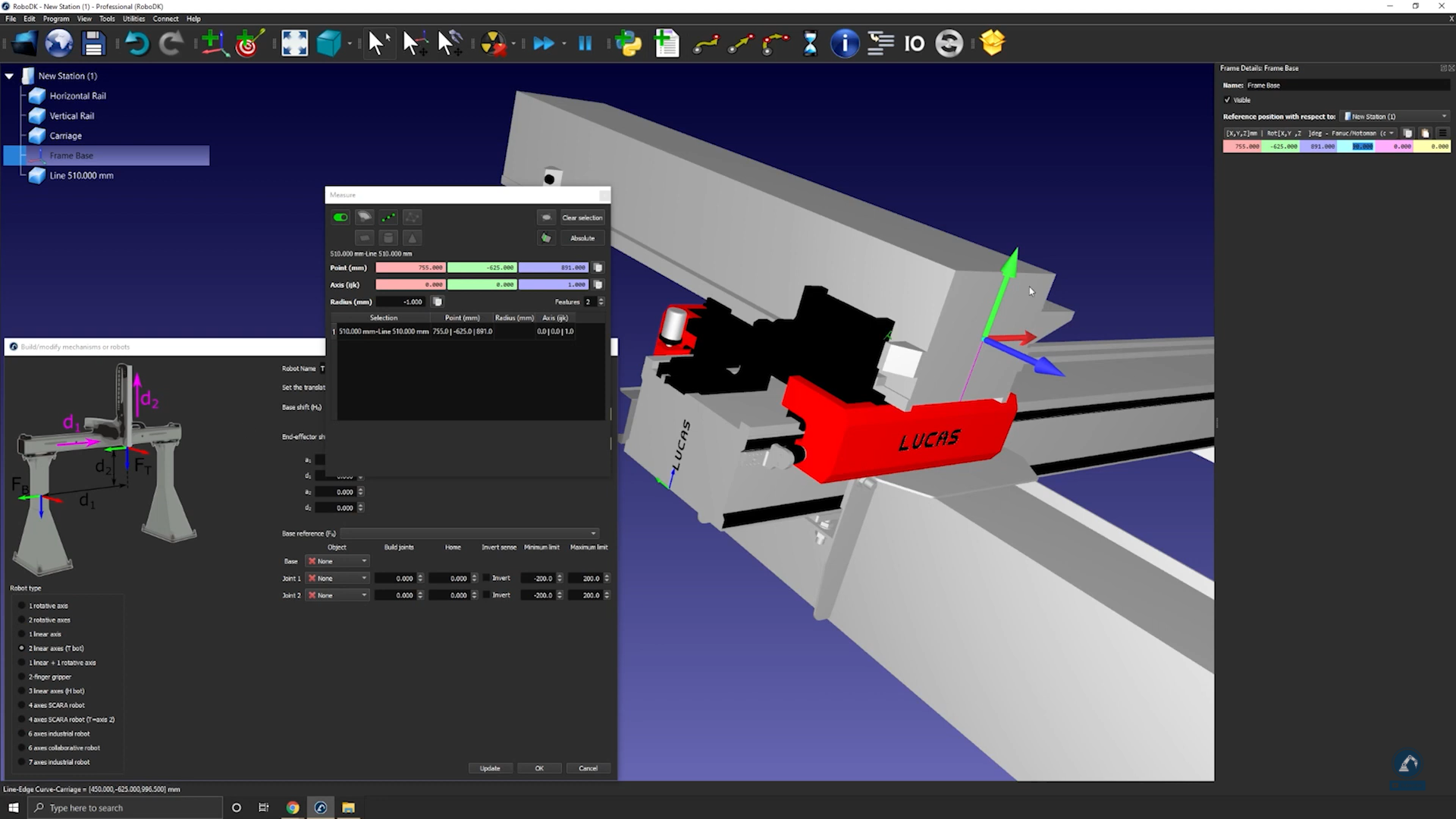
9.Measure the position of the center of the surface by opening your measurement tool: Tools ➔Measure.
10. Select the center point of each edge (as shown below) to find the distance between the two lines.
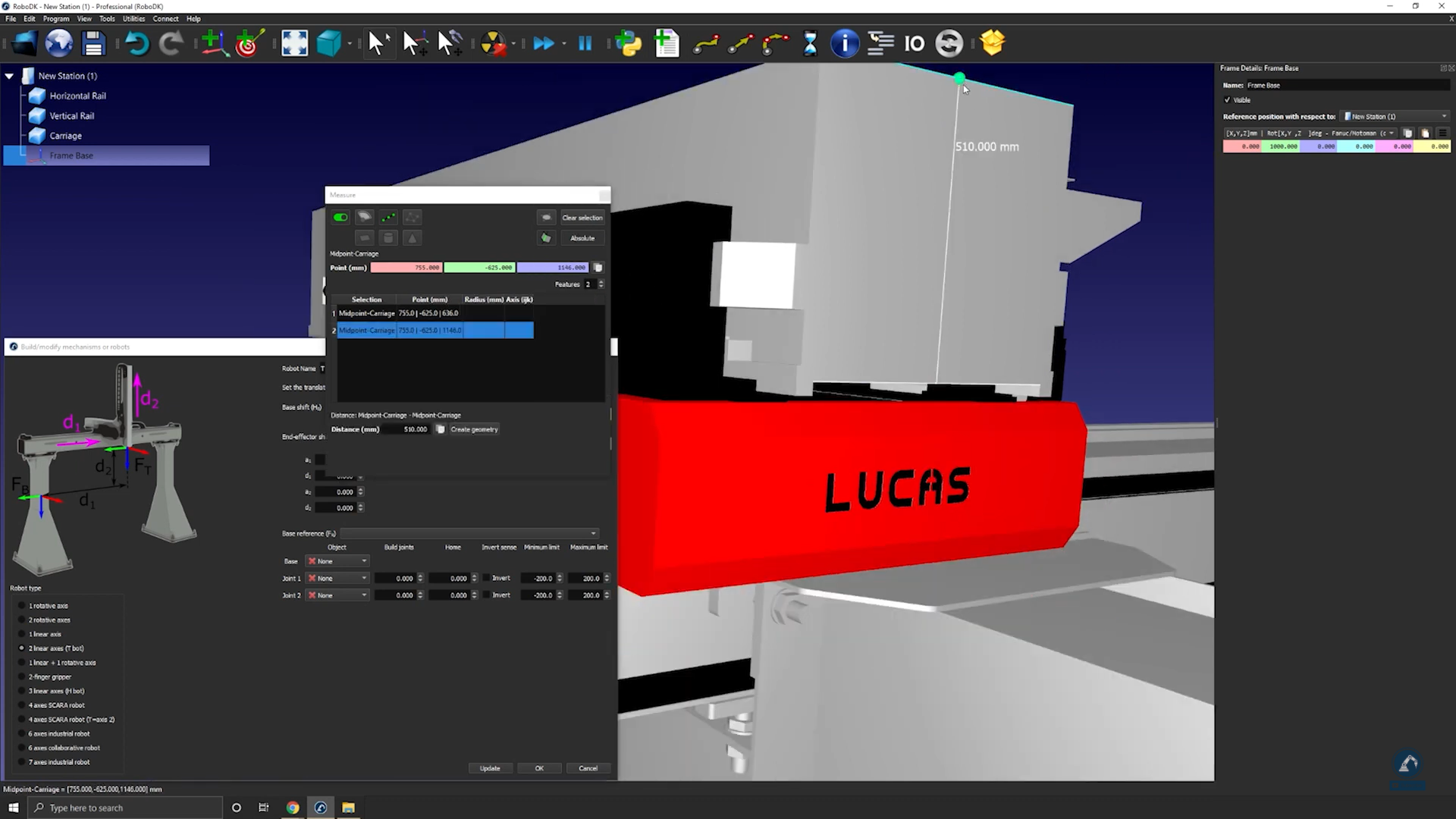
11. Select Create Geometry in the Measure window which will create a line between the two points.
12. Select Clear Selection.
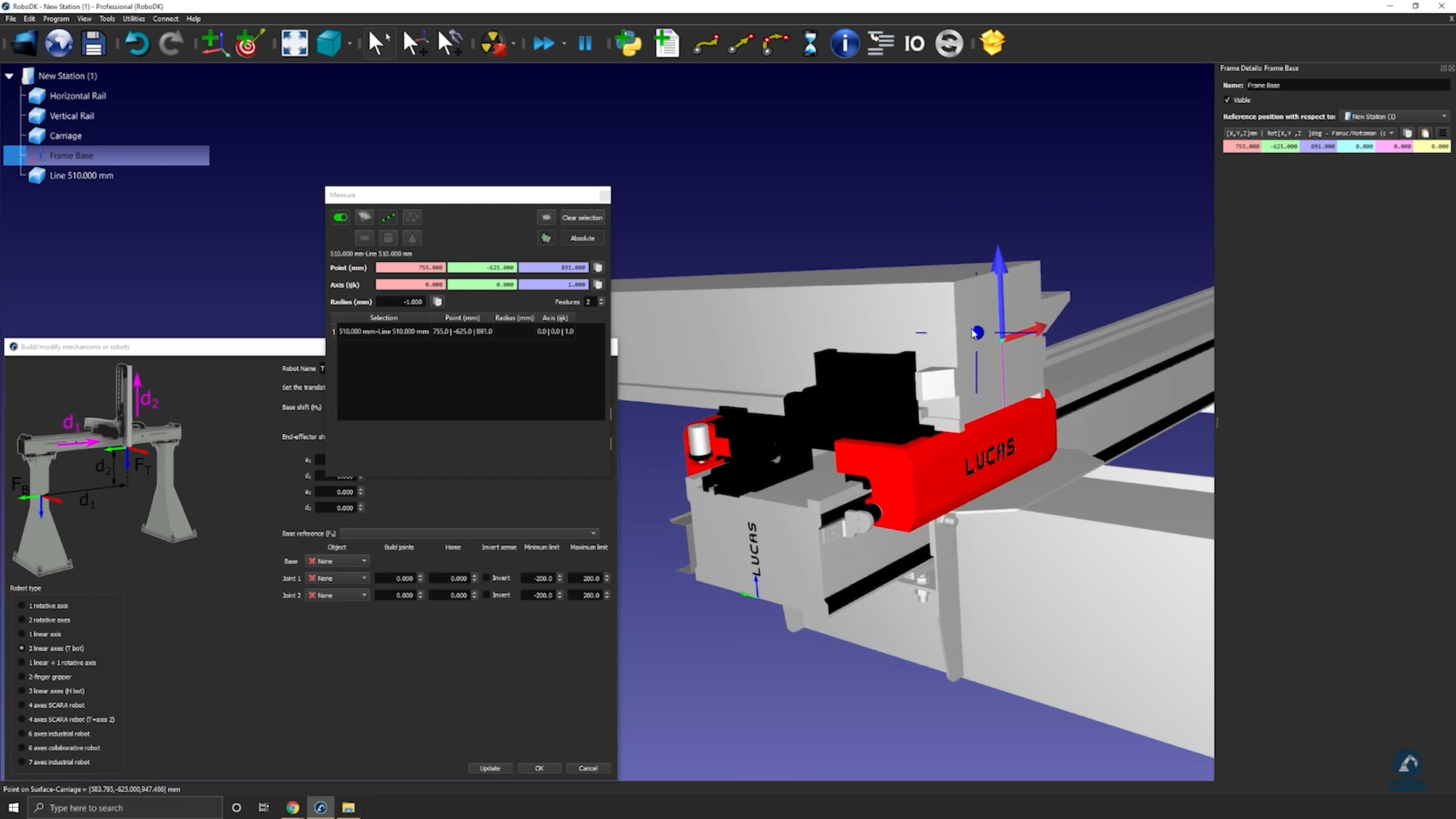
Follow these steps to measure the position of the center point between the two lines:
13. Select the center point of the line.
14. Copy the values in the Measurement window and paste the values as the frame position (as shown below).
Follow these steps to make sure the orientations are the same:
15. Rotate counterclockwise, 90 degrees, around X and then rotate 90 degrees around the Z axis (as shown below).
16. Enter the measurements of the rail in the Model Mechanism or Robot window as show below.
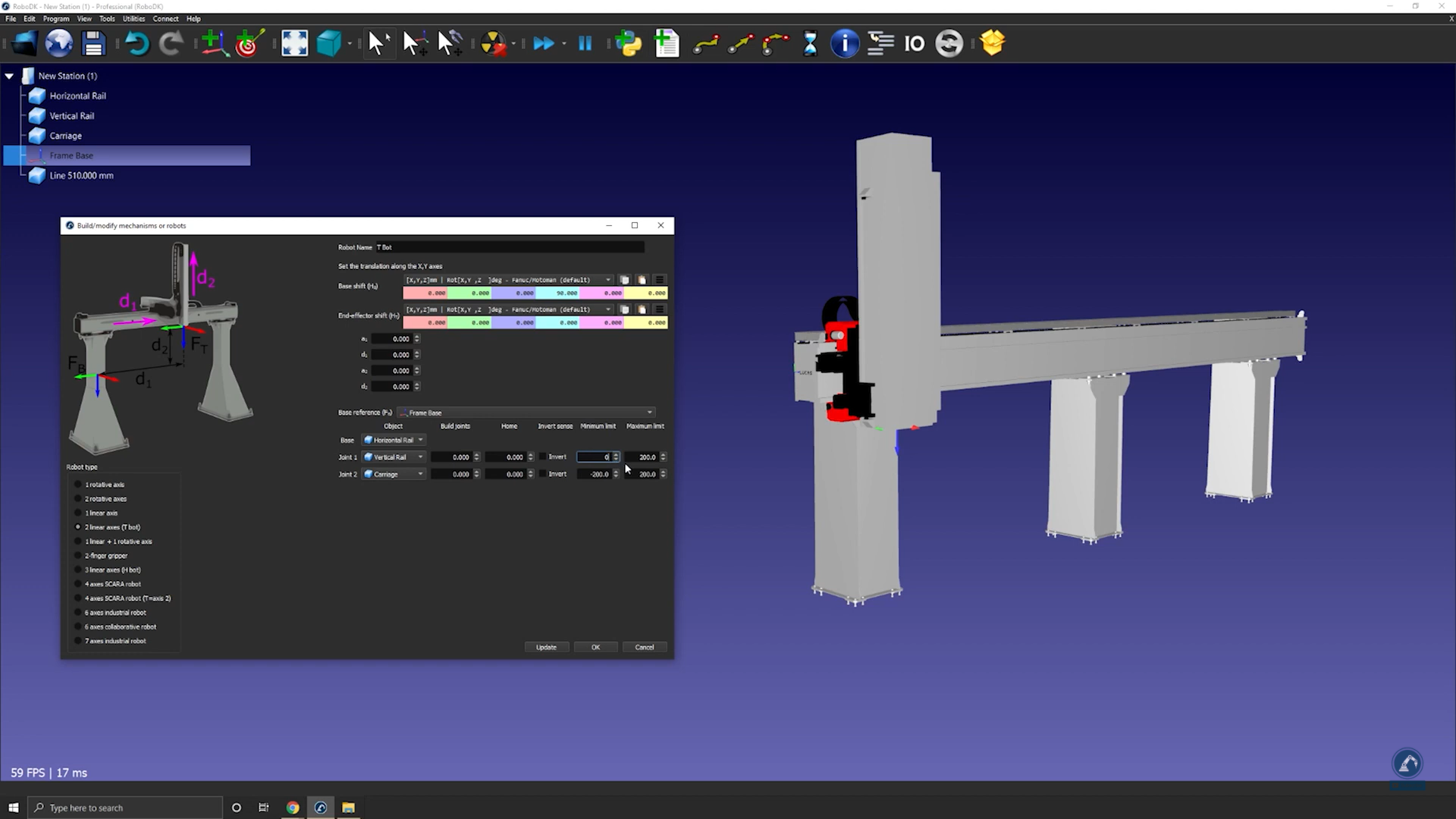
17. Select Update to create the robot.
18. If you are satisfied with the results, select Ok in the “Model Mechanism or Robot” window.