General Tips
When you have one or more additional axes synchronized with your robot you can prioritize moving certain axes and optimize your robot machining projects, curve/point follow projects and 3D printing projects according to your preferred criteria.
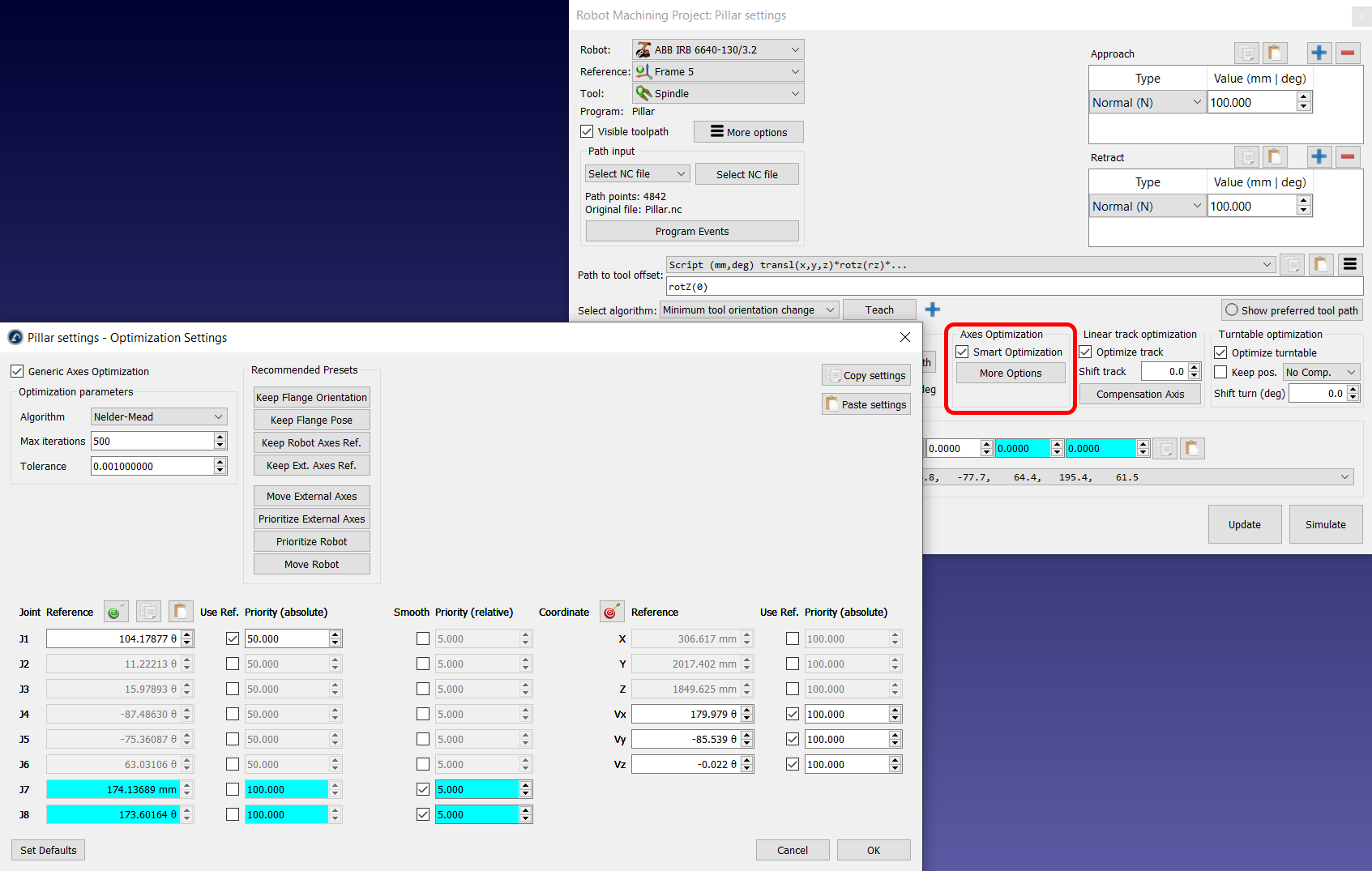
Select More Options in the Axes Optimization section of your robot machining project to see the external axes optimization options.
You can provide different priority according to the following criteria:
● Maintain reference joints: You can impose a desired axis position for some (or all) joints. A higher weight means it is more likely to match the reference value anytime during the program.
● Minimize motion (match previous position): You can impose a “penalty” to moving certain axes abruptly (relative motion).
● Maintain reference pose: You can impose a desired absolute robot pose to maintain. The reference pose is the pose of the robot flange with you want to maintain with respect to the static robot base. The orientation constrain will try to match the X, Y, Z vectors of the robot flange pose according to the reference pose.
For example, if you select the Keep Flange Orientation preset, RoboDK will prioritize maintaining the orientation of the robot flange to match the robot pose you had in the simulation at the moment you selected this preset (selecting this preset updates the Reference pose). Furthermore, if you want the robot joint 1 value to remain in the vicinity of 105 deg you can activate this priority.
If you select the Keep Robot Reference preset, you will see the position reference is updated to match the current position of the robot axes. You will also see the robot joints have a certain weight (100) whereas the external axes have no weight (no preference). On the other hand, external axes will have a small weight (5) to prevent them from doing sudden or undesired movements.
You can change these settings to obtain the desired effect after you update your robot machining project.