General Tips
It is possible to synchronize a robot arm with additional external axes. External axes can be simply used as a positioner or they can also be synchronized with the same robot controller. When external axes are synchronized, the robot and the axes can move at the same time while keeping accurate linear movements relative to a coordinate system.
You can synchronize up to 6 additional axes with any robot using RoboDK. If you are using a 6-axis robot this means you can have a combined system with 12 axes.
To synchronize a robot arm with external axes:
1.Load your additional axis from our library or model it as a new mechanism.
2.Build a RoboDK station placing the robot and axes/mechanisms in their location.
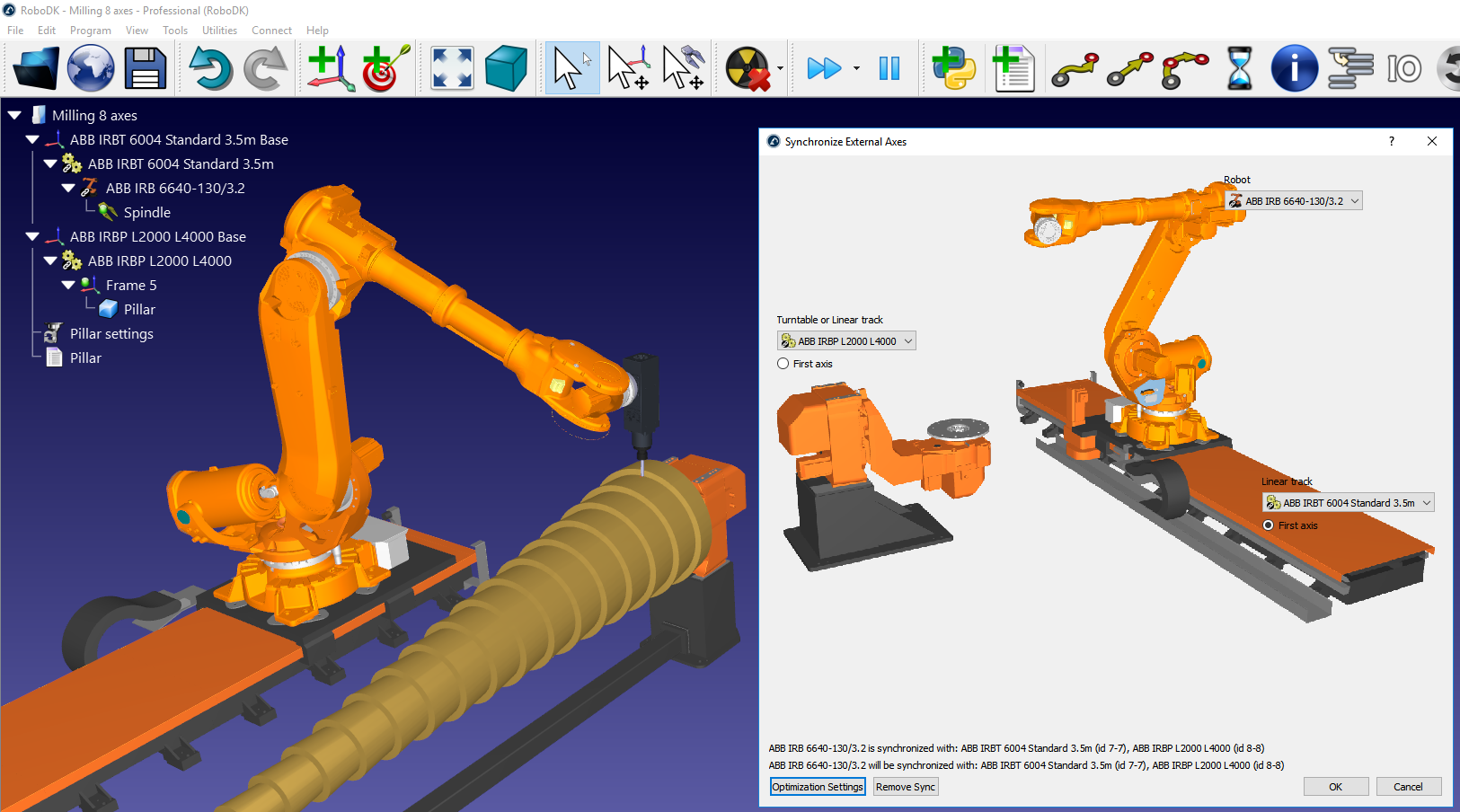
3.Select Utilities➔Synchronize External Axes.
4.Select the robot and the available turntable and/or linear track will be available to synchronize with the robot.
5.Select OK. A new robot panel will open showing the additional axes in blue.
Targets related to this synchronized robot will show additional joint values in blue. It is possible to specify the preferred position of a positioner when a program is generated. Cartesian targets will keep the provided Cartesian position while moving the external axes along the path.
Any robot machining settings will show additional options to provide the preferred position of the external axes. Also, each movement exported through the post processor will include the position of the external axes.