Getting Started
You can easily create a new program that safely approaches the robot to the part.
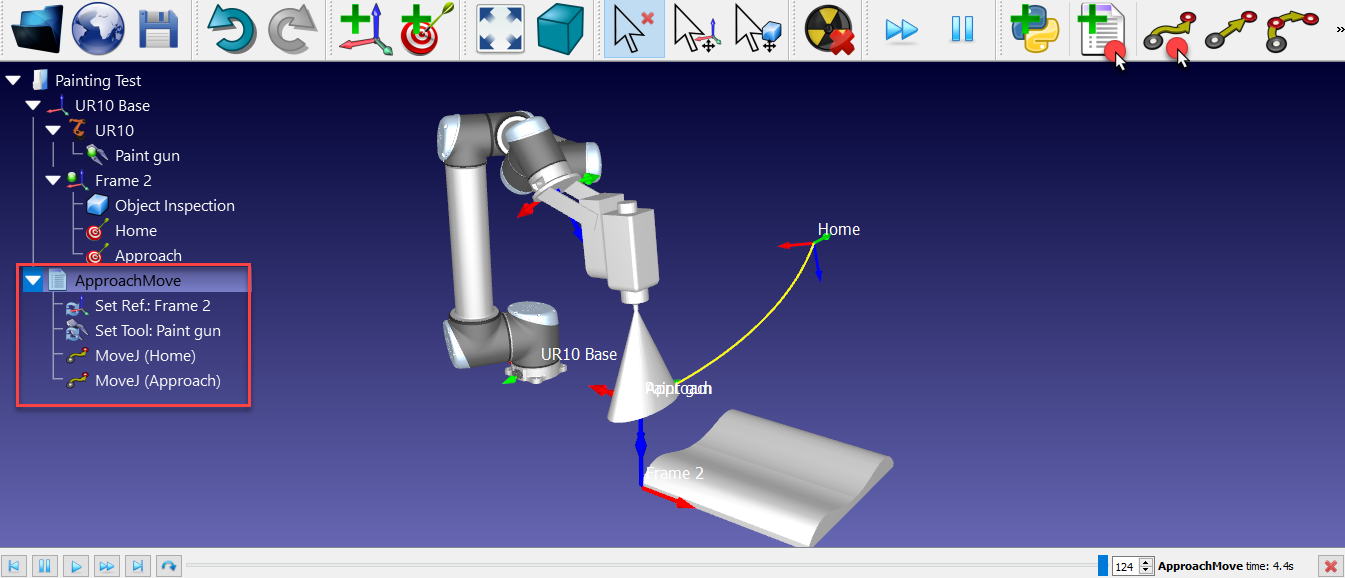
Follow these steps to create a program that moves from the Home target to the Approach target:
1.Select Program➔![]() Add Program from the menu or the corresponding button in the toolbar (as shown in the next image).
Add Program from the menu or the corresponding button in the toolbar (as shown in the next image).
2.Rename the program to ApproachMove.
3.Select the Home target.
4.Select Program➔![]() Move Joint Instruction (or the corresponding button in the toolbar)
Move Joint Instruction (or the corresponding button in the toolbar)
Two instructions will be added automatically to tell the robot what tool frame and reference frames we are using.
5.Select the Approach target
6.Select Program➔![]() Move Joint Instruction again.
Move Joint Instruction again.
Double click the ApproachMove program and it will execute the program simulation. The simulation bar and an estimated cycle time will be displayed.