Interface
Robot targets allow you to record specific robot positions so that the robot can be moved to that location.
Follow these steps to add a new target and see the information attached to it:
● Select Program➔![]() Teach Target (Ctrl+T) to create a new target.
Teach Target (Ctrl+T) to create a new target.
This will record the current position of the robot using the active reference frame ![]() and the active tool frame
and the active tool frame ![]() . The target will be added to the active reference frame.
. The target will be added to the active reference frame.
● Right click a target, then select More Options… (F3) to see the recorded pose and joint values.
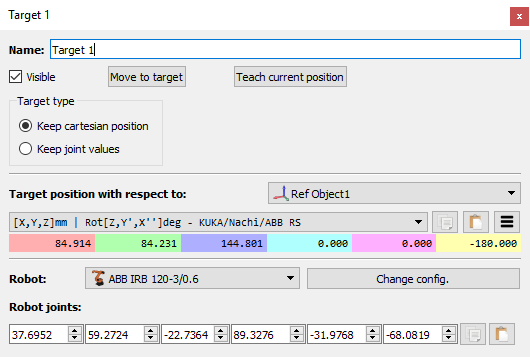
Creating a new target records the TCP with respect to the reference frame in the Cartesian space as well as the current robot axes. By default, RoboDK creates targets as Cartesian targets (Keep cartesian position ![]() ). In this case, if the reference frame is moved, the robot will try to reach the position of the target with respect to that reference frame.
). In this case, if the reference frame is moved, the robot will try to reach the position of the target with respect to that reference frame.
On the other hand, it is possible to specify the target in the joint space (Keep joint values ![]() ). In this case, the target is an absolute robot position and it will not be altered if reference frames are moved.
). In this case, the target is an absolute robot position and it will not be altered if reference frames are moved.
It is common practice to use joint targets to reach a first approach position close to the working area, then, Cartesian targets ensure that the toolpath is not altered if the reference frame or the tool frames are modified.
It is possible to see other configurations to reach the same pose with the robot. More information in the next section.