OPC-UA
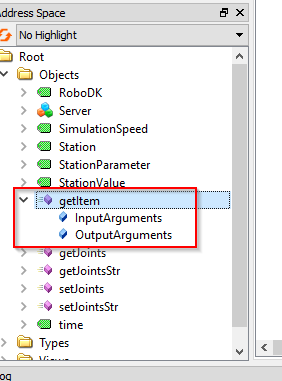
RoboDK OPC UA Server is also provided with some methods to allow the user to access the RoboDK station ‘s Data dynamically.
We can just right click the Method>Call to execute the method.
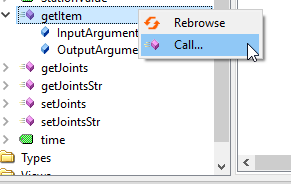
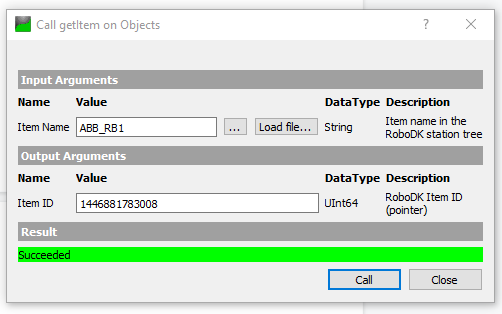
getItem is a Method that allows the user to get the pointer of your Item.
For the InputArguments, Device Name is required, you can image the Device Name is your Station Name,Robot Name..etc.. And Item ID is the OutputArguments that return the Pointer of that Device.
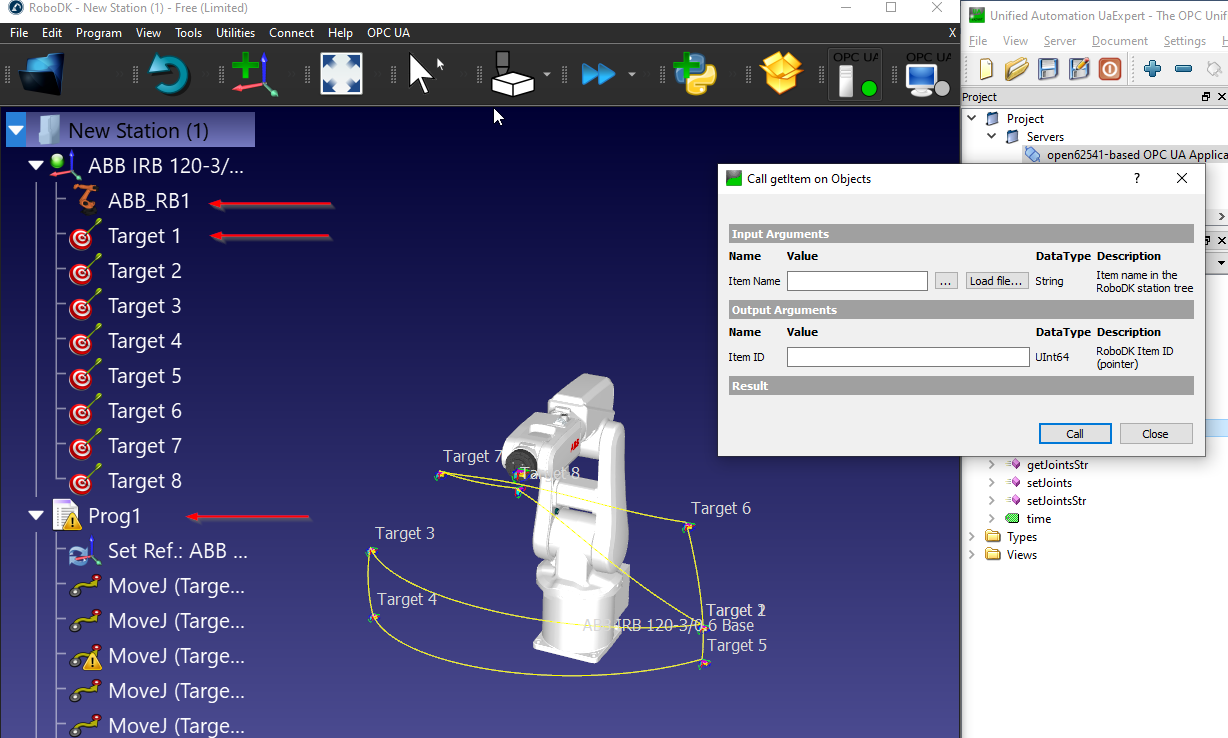
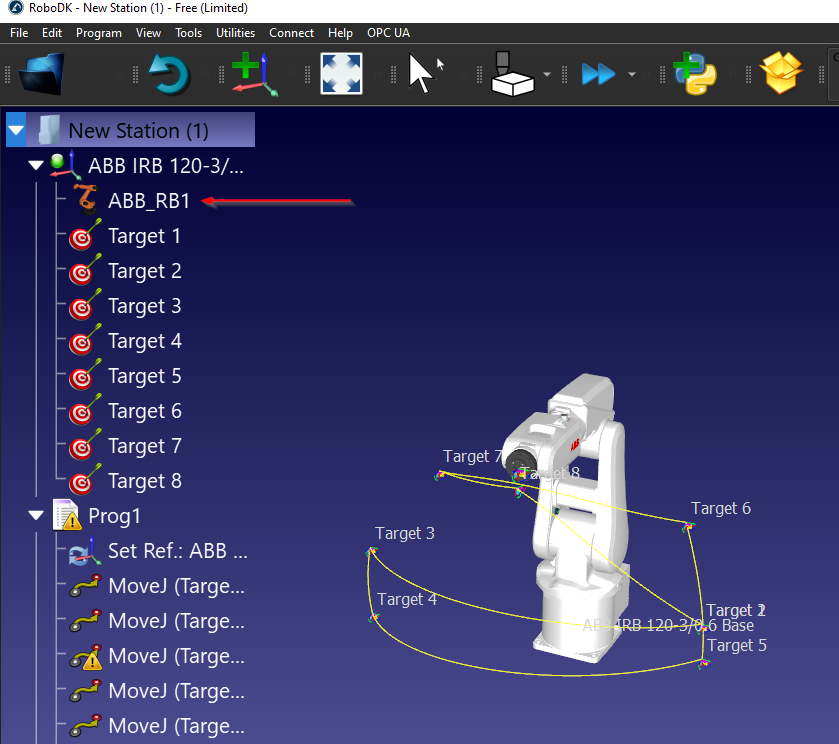
In this Example, I received the Item ID (Pointer) of my ABB Robot that is named as “ABB_RB1”.
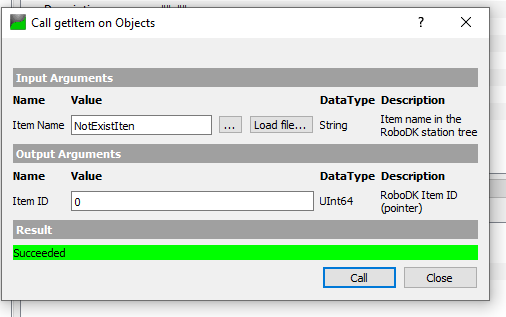
0 is returned if the Item Name is invalid or does not exist inside your station.
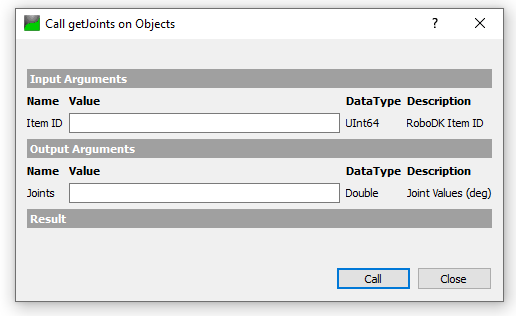
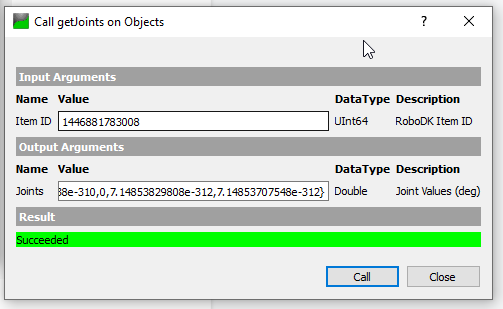
getJonits is a method that allows the user to get the joint value of the robot from the station, based on the Item ID.
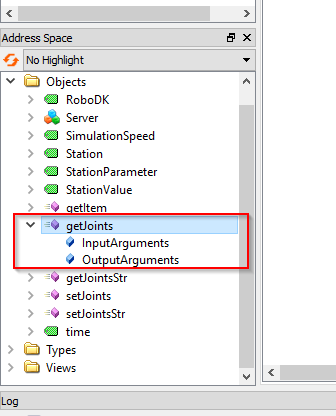
The Item ID is the pointer value of your Item, and you can get it from getItem() Method.
We will get the Item ID with this “ABB_RB1” Item name, and a UInt64 value is returned.
Joints value is returned while passing the Item ID in the method that we got in the previous.
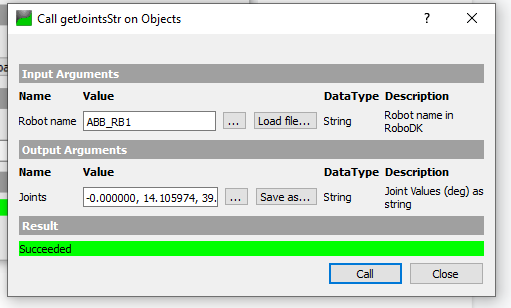
getJointsStr is a method that allows the user to get the Joints value based on a String Value.
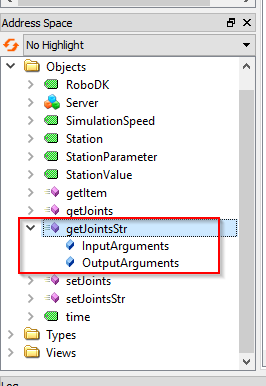
We can pass the Robot name (String) in this method.
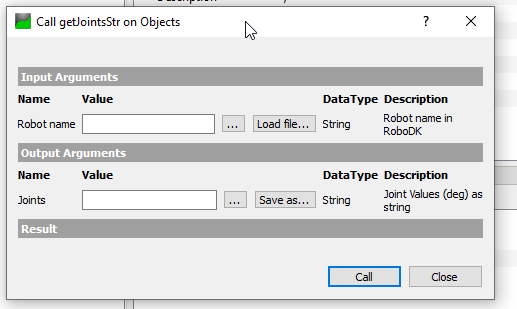
In My Station, ABB_RB1 is my robot’s name.
We can just pass “ABB_RB1” in the Robot name parameter and call the method - The joint value in String format is returned.
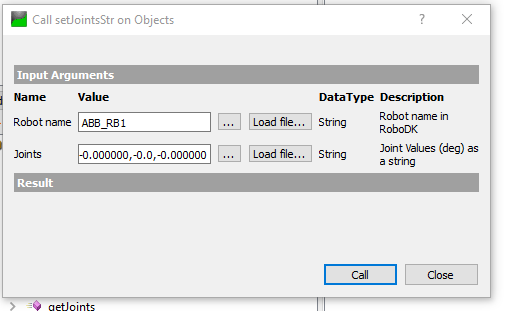
setJointsStr is a method that allows the user to set the Joints value of the Robot, based on a String Value.
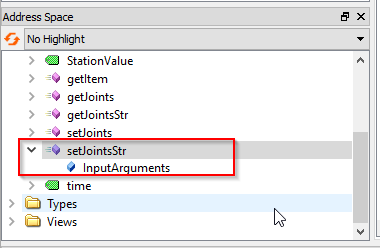
In the Robot name, ABB_RB1 is passed, and we can just pass a string with the joint value in the Joints parameter.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000