setJointsStr is a method that allows the user to set the Joints value of the Robot, based on a String Value.
![OPC UA - Image 46]()
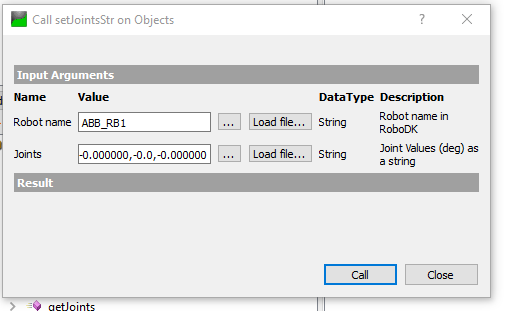
In the Robot name, ABB_RB1 is passed, and we can just pass a string with the joint value in the Joints parameter.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000
![OPC UA - Image 47]()