Options Menu
The station parameters are the only parameters in the options menu that are saved with the RoboDK project (RDK file), instead of the user account settings.
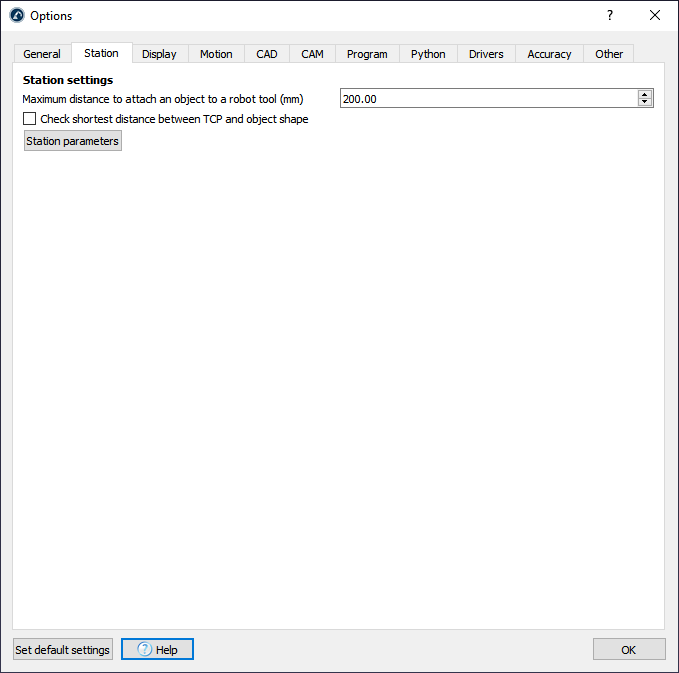
The Maximum distance to attach an object to a robot tool is used by a simulation event. Simulation events can attach objects to tools and simulate specific events. These events have no impact on generated code, they are only used for simulation purposes.
The Station parameters are state parameters that are saved with the RDK file and can be modified manually or through the API. The Station parameters allow simulating Digital Inputs and Digital Outputs and communicate the simulation with other systems through the API such as a PLC.