RoboDK Plugin for BobCAD-CAM
Select the Settings button to open the settings related to the RoboDK plugin for BobCAD-CAM.
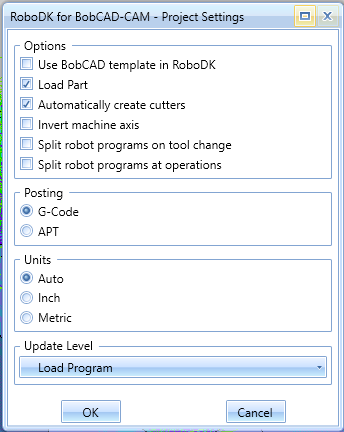
Among other things, you can modify the following options:
1.Use the BobCAD-CAM template instead of the RoboDK template (the 3D navigation and color templates in RoboDK will match BobCAD-CAM style).
2.Load and update the part in RoboDK every time you post a new machining operation. Only visible solids and surfaces will be loaded.
3.Checking the option Invert machine tool axis allows you to automatically account for your tool Z axis pointing towards the inner side of the tool (instead of pointing toward the outside).
4.Use G-Code files instead of APT files. RoboDK can read the following files to generate robot simulations and programs:
a.APT files (default option): Loads BobCAD-CAM native APT files in RoboDK. This is the preferred method for most operations.
b.G-code files: Generates G-code machining files. Note that this format depends on the post processor you select, and it is mostly designed to work with 3-axis machining toolpaths.