RoboDK Plugin for FeatureCAM
Select the Settings macro to open the FeatureCAM settings related to RoboDK. You’ll see the settings window shown in the following image.
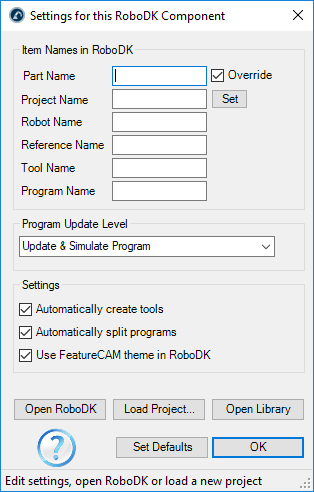
You can modify the following options:
1.Part name is the name of the 3D model when it is loaded in RoboDK. Leave it blank to automatically use the name used in FeatureCAM.
2.Project name allows you to specify a RoboDK project file (RDK). It is possible to specify a default RoboDK project (RDK file) to automatically display simulations or generate robot programs. Leave it blank to automatically use the currently open project in RoboDK.
3.Automatically create tools allows you to automatically create new TCPs based on the tool holder and the cutter geometry defined in FeatureCAM. The first tool held by the robot is considered the tool holder and new TCPs are calculated as an offset from the tool holder.
4.Automatically split programs will automatically split the complete robot machining project as sub projects (operations). Creating one operation for each tool.
5.Use the FeatureCAM theme in RoboDK will make the 3D navigation and background colors in RoboDK match FeatureCAM style.
You can also specify the tool holder and reference frame (datum) for your robot machining operations.
Select Load Project… to preview recently opened project or create a new project using the default setup.
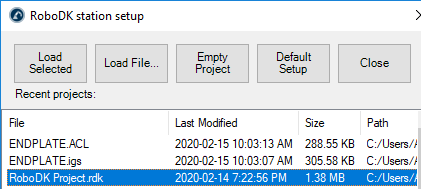
The following options are available:
● Load Selected: Load a previous project used in RoboDK (RDK file)
● Load File…: Select a RoboDK station file (RDK) to open it with RoboDK and use it as the default project with the current FeatureCAM project.
● Empty Project: Open RoboDK with a new empty station to build a new setup. More information to set up a new project from scratch available in the Getting Started section.
● Load Part: Load the part from FeatureCAM to RoboDK (the part will be saved as an STL file and loaded automatically).
● Default Setup: Set up new station with a default robot, spindle and reference frame. The part will also be automatically exported to RoboDK.
Visit the robot machining section for more information about building a new setup for robot machining.