RoboDK Plugin for Mastercam
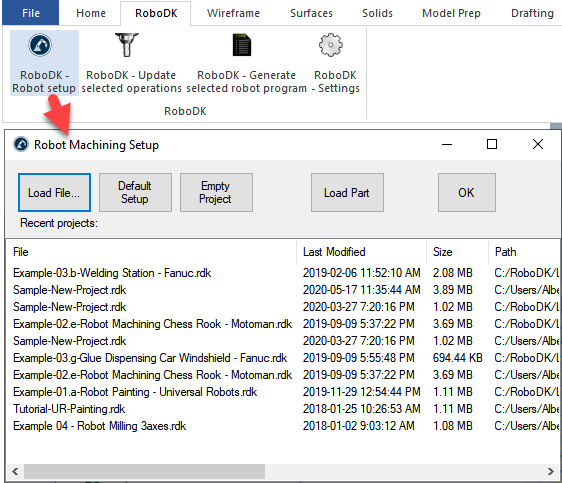
The Robot setup ![]() button opens a project management window and allows opening an existing robot machining project or set up a new robot machining project. The goal of the robot setup is to select the robot, load an EOAT (End of Arm Effector, or TCP) and add at least one reference frame. The following options are available:
button opens a project management window and allows opening an existing robot machining project or set up a new robot machining project. The goal of the robot setup is to select the robot, load an EOAT (End of Arm Effector, or TCP) and add at least one reference frame. The following options are available:
● Load File…: Select a file to open it with RoboDK and use it as the default project for your Mastercam project.
● Default Setup: Set up new station with a default robot, spindle and reference frame. The part will also be automatically exported to RoboDK.
● Empty Project: Open RoboDK with a new empty station to let the user build a new setup. More information to set up a new project from scratch available in the :LoadRobot.
● Load Part: Load the part from Mastercam to RoboDK (the part will be saved as an STL file and loaded automatically). All visible solids and surfaces will be loaded.
Visit the :MachiningSetup for more information about building a new setup.
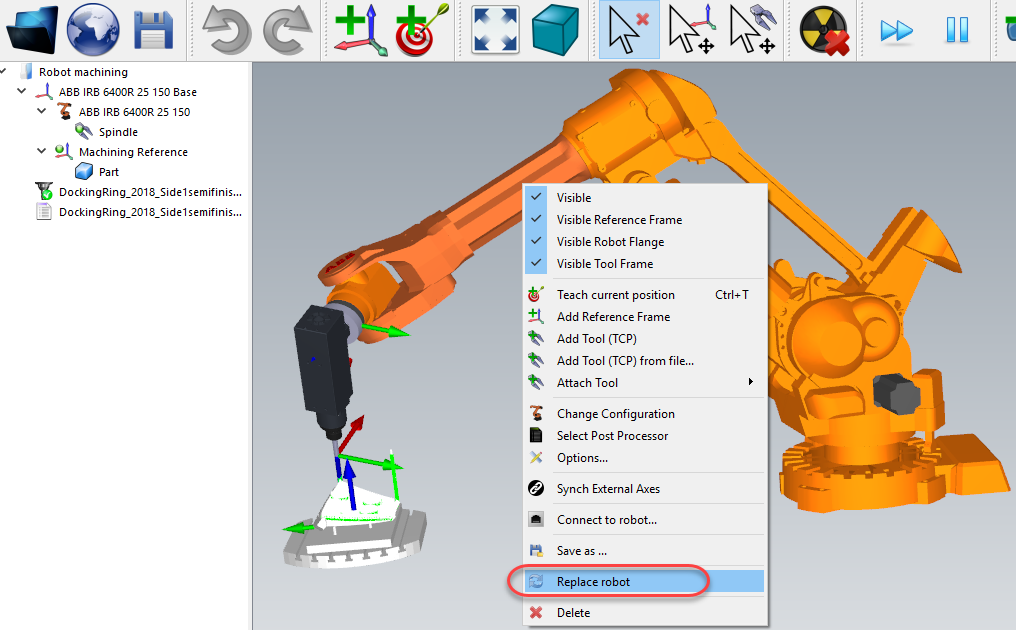
You can easily change the robot, modify the tool and/or the reference frame. As an example, follow these steps to change the robot:
1.Right click the robot
2.Select Replace robot (as shown in the image)
3.Select the new robot
The RoboDK installer only provides a few robots by default, however, it is possible to download more robots from the online library.
More information about adding a robot tool is available in the :CreateTCP.
Hold Alt+Shift to move a robot tool (TCP). This is useful to set the pose of the robot before teaching a target.
Save the project to keep the changes by selecting File➔Save Station (Ctrl+S).