RoboDK Add-In for Rhino
The RoboDK plug-in for Rhino includes with 3 Grasshopper components:

● ![]() Curve to robot (Crv2Rob) – Load a curve (C) or a group of curves in RoboDK. Optionally, one or more surfaces (S) can be provided to extract surface normals for each point in the curve.
Curve to robot (Crv2Rob) – Load a curve (C) or a group of curves in RoboDK. Optionally, one or more surfaces (S) can be provided to extract surface normals for each point in the curve.
● ![]() File to robot (File2Rob) – Load a file (F) in RoboDK. The path of that file must be provided. RoboDK supports loading APT or G-code files that are meant for 5-axis manufacturing purposes, such as 3D printing or robot machining. Read the robot machining section for more information.
File to robot (File2Rob) – Load a file (F) in RoboDK. The path of that file must be provided. RoboDK supports loading APT or G-code files that are meant for 5-axis manufacturing purposes, such as 3D printing or robot machining. Read the robot machining section for more information.
● ![]() Points to robot (Pts2Rob) – Load a point (P) or a group of points in RoboDK. Optionally, you can also provide the corresponding normal vectors (or approach vector) for each point (N).
Points to robot (Pts2Rob) – Load a point (P) or a group of points in RoboDK. Optionally, you can also provide the corresponding normal vectors (or approach vector) for each point (N).
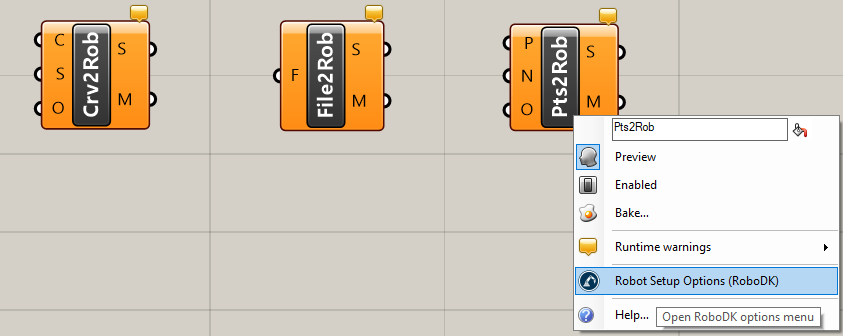
All the components return a status (S) as a percentage (100% means that the robot can complete the program successfully). Also, a descriptive message (M) can be read from each component.
You can right click any component and select Robot Setup Options (RoboDK) to customize the settings specific to one component.