RoboDK Add-In for SolidWorks
This section shows basic examples to load a SolidWorks project in RoboDK for robot simulation and offline programming purposes.
The following example shows how you can create a simple toolpath for robot welding from SolidWorks.
The following example shows how you can program a robot for a liquid dispensing application using SolidWorks and RoboDK.
This example shows how to load a sample RoboDK station (default setup) and follow a set of curves defined in SolidWorks with the robot.
1.Load the 3 bladed Propellers example in SolidWorks.
2.Select the RoboDK tab and select ![]() Settings.
Settings.
3.Select Load Project…
4.Select Default Setup. RoboDK will start and load a sample project with a KUKA robot, one tool (a spindle as Tool 1) and one reference frame (Reference 1).
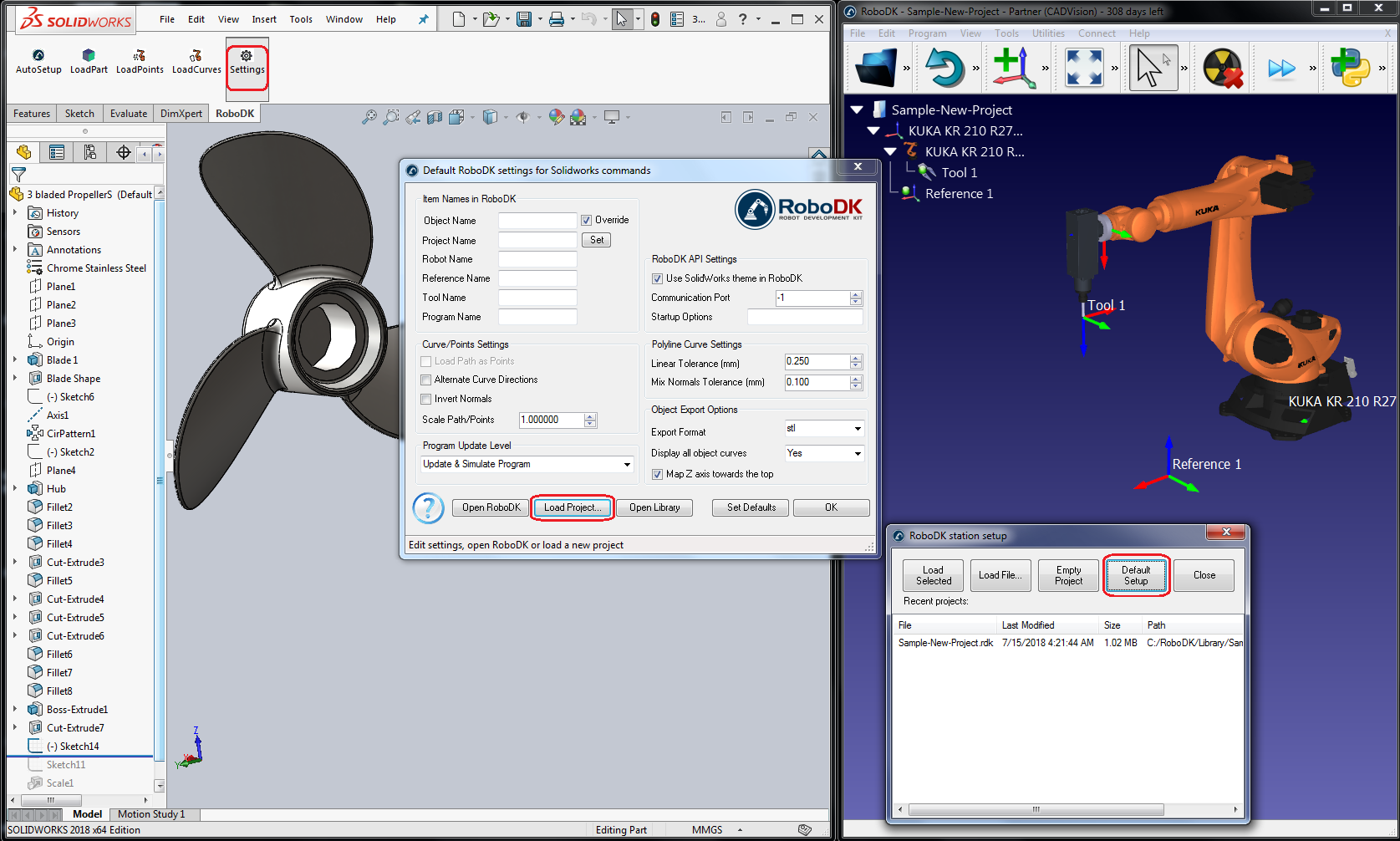
5.Close the Settings window or select OK.
6.Select the ![]() Auto Setup button in SolidWorks.
Auto Setup button in SolidWorks.
7.Select all the curves and surfaces and press OK in Property Manager Page. The project will be loaded in RoboDK as shown in the following image.
You should see the part loaded on the active reference frame (Reference 1) and a new Curve follow project in RoboDK that follows the toolpath.
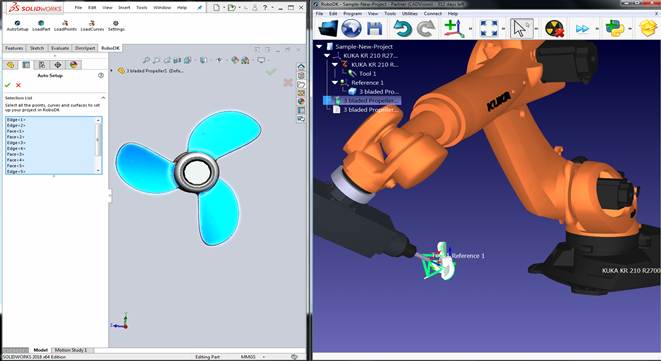
You can see the approach movement is normal to the toolpath. The robot should be able to move along the toolpath without any issues.
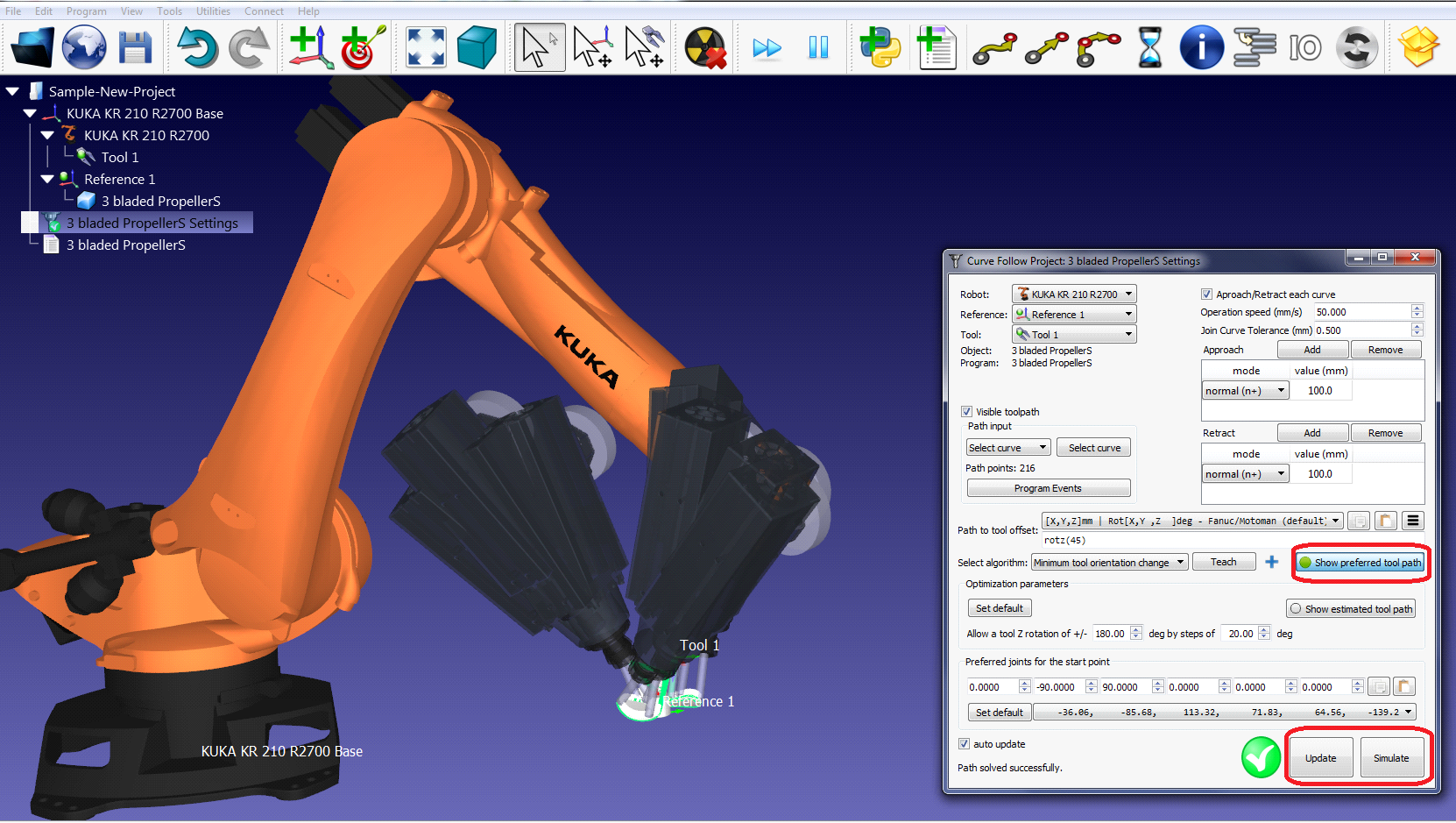
Double click the ![]() 3 bladed Propeller Settings from the RoboDK tree to open more options and customize the toolpath followed by the robot.
3 bladed Propeller Settings from the RoboDK tree to open more options and customize the toolpath followed by the robot.
For example, you can select Show preferred tool path to see and modify the default orientation of the tool with respect to the part. Change the Path to tool offset value to define an additional rotation. To do so, you can enter a new value or just use the mouse wheel to see a quick preview of the result.
More information to change these settings is available in the robot machining section.
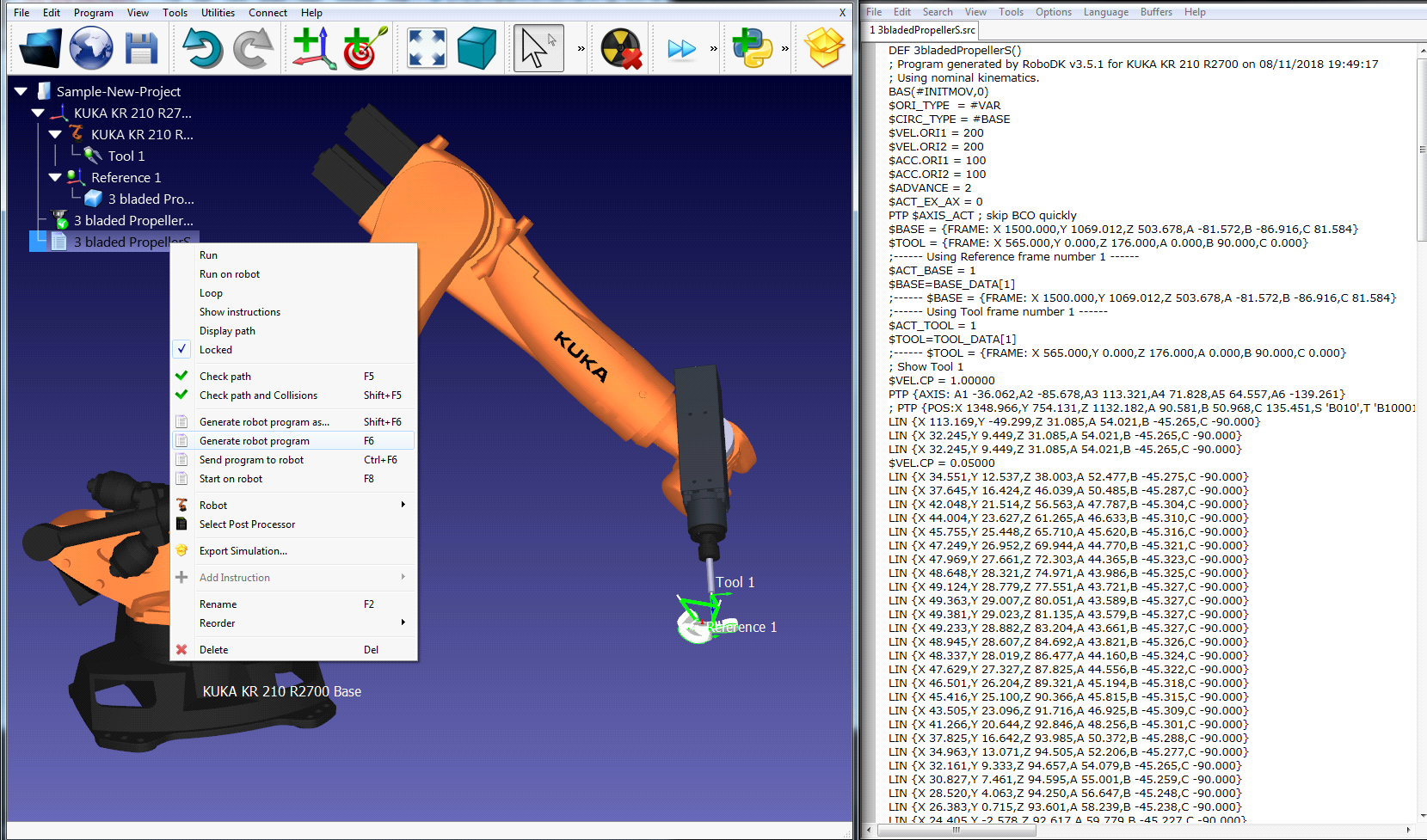
Finally, when the simulation produces the desired result, you can generate the program or export the simulation:
8.Right click the program
9.Select Generate robot program (F6). The robot program will be generated and displayed.