RoboDK API
This example shows how to create a new station using a UR robot and simulate a hexagonal movement with the robot.
1.Select File➔![]() Open
Open
2.Open the UR10 robot
3.Select File➔![]() Open
Open
4.Open the Paint_gun.tool file
5.Open the sample Python program SampleOfflineProgramming.py from C:/RoboDK/Library/Macros/
6.Double click the SampleOfflineProgramming item to run the simulation. The robot should draw a hexagon around the current location of the robot and the trace of the TCP will be displayed in yellow.
Alternatively, right click the program and select ![]() Run Python Script.
Run Python Script.
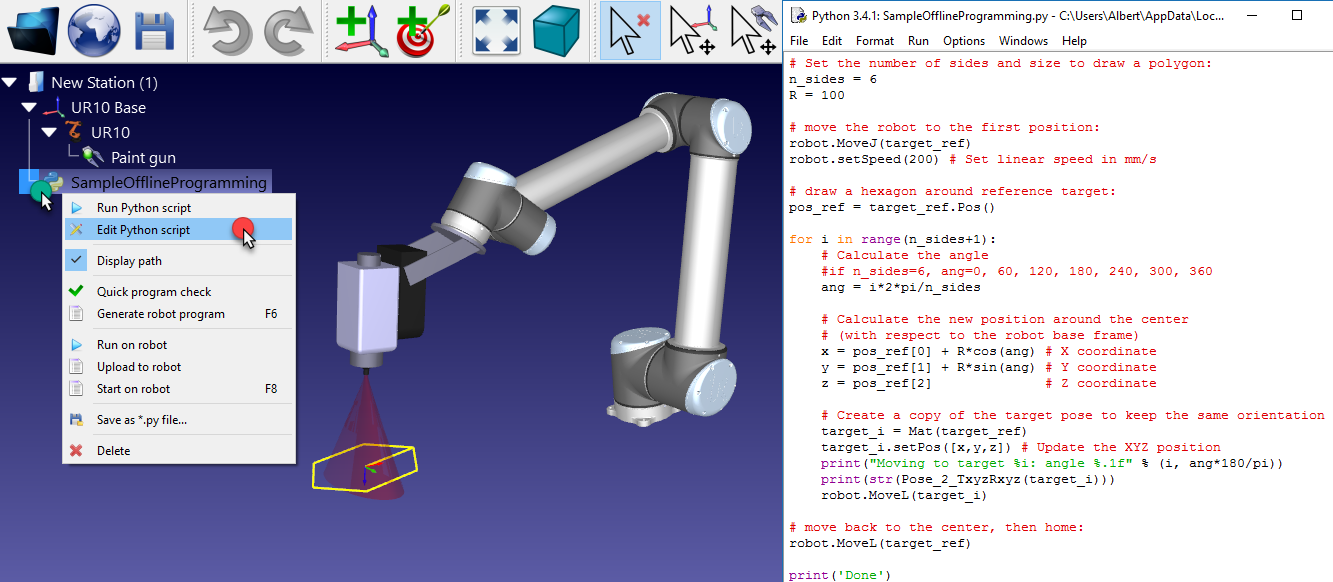
7.Right click the ![]() SampleOfflineProgramming item and select Edit Python Script. We should see the program as shown in the following image.
SampleOfflineProgramming item and select Edit Python Script. We should see the program as shown in the following image.
The SampleOfflineProgramming macro will draw a polygon of side n_sides and radius R at the current location of the robot, with respect to the robot reference frame. If desired, move the robot to a different location changing the polygon dimensions and re-run the program.
This example is similar to the program displayed in the offline programming section of the website (video included).