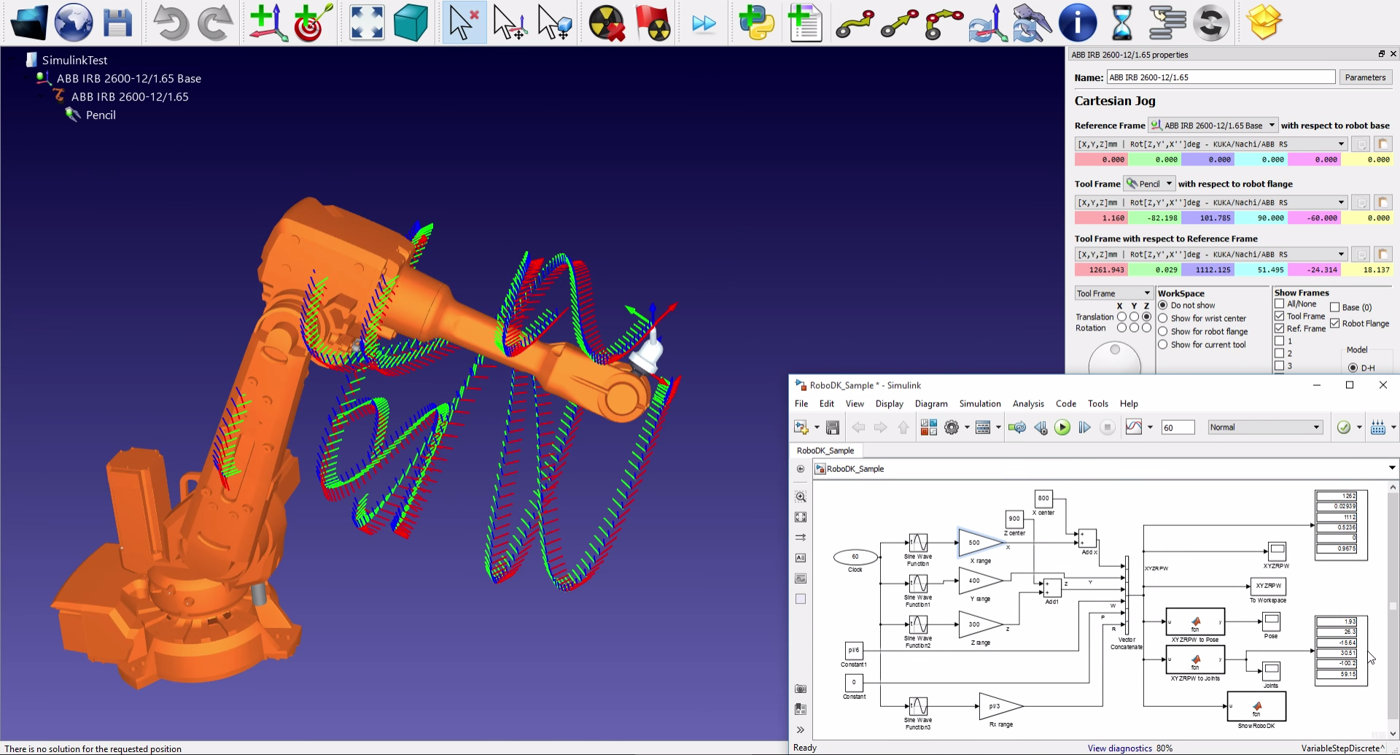
A Simulink project is available as an example. In the simulation, the robot is moved along a set of XYZ coordinates generated arbitrarily.