Robot Programs
Select Program➔![]() Move Circular Instruction to add a new circular movement instruction. Alternatively, select the corresponding button in the toolbar.
Move Circular Instruction to add a new circular movement instruction. Alternatively, select the corresponding button in the toolbar.
Unless two targets are selected before adding the instruction, the movement instruction will create no new targets. It is required to add two more targets separately and link them from the circular move instruction, as shown in the next image.
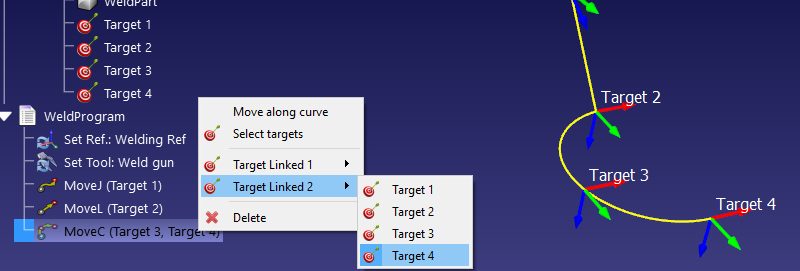
The circular path is an arc created from the point where the robot is located, passing through the first circular point (Target Linked 1) and ending at the end point (Target Linked 2).