When you have a program ready to be exported to the robot you can generate the program file required by your robot controller.
Follow these steps to generate a robot program:
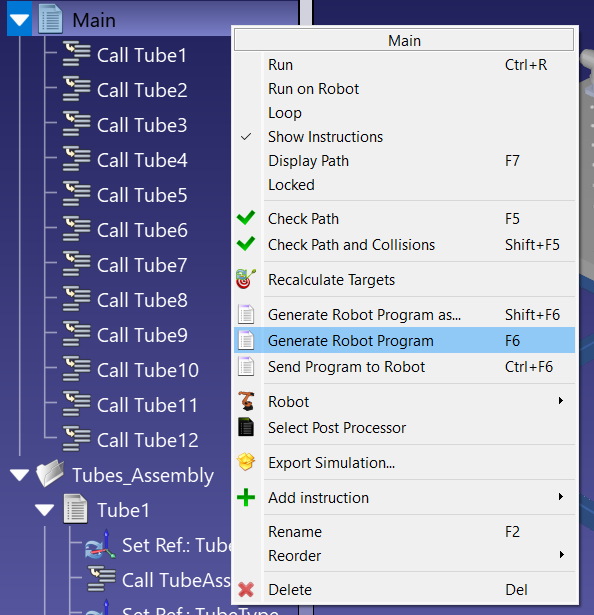
1.Right click a program.
2.Select Generate Robot Program (F6).
You should then see the robot program displayed in a text editor.
Note: You can also select Program➔Generate Program(s) (F6) to generate one or more robot programs when you have one or more programs selected.
Tip: Hold the Control key (Ctrl) to select multiple programs at the same time and generate them all at once.
![Robot Programs - Image 38]()
Robot programs are saved in the Documents folder by default (C:/Users/Your Name/Documents/RoboDK/Programs/). You can change this folder by selecting Tools➔Options, select the Program tab and click on Set right beside the Robot programs folder.
Note: It is best practice for some robot controllers to integrate the generated program and required subprograms with same program file. RoboDK already takes care of this detail, and you should see the subprograms included in your main program for the robot controllers that support this feature (for example: ABB, Universal Robots or KUKA controllers). On the other hand, for robots that don’t support this feature you’ll have to generate multiple files and transfer to the robot controller to properly run all programs (for example, on Fanuc or Yaskawa/Motoman controllers). Some post processors allow you to configure this behavior. You can find more settings in Tools➔Options and select the Program tab.
Alternatively, you can also right click a program and select Generate Robot Program as … (Shift+F6) to generate the program specifying the location where you would like to save it.