Robot Programs
Select Program➔![]() Move Joint Instruction to add a new joint movement instruction. Alternatively, select the corresponding button in the toolbar.
Move Joint Instruction to add a new joint movement instruction. Alternatively, select the corresponding button in the toolbar.
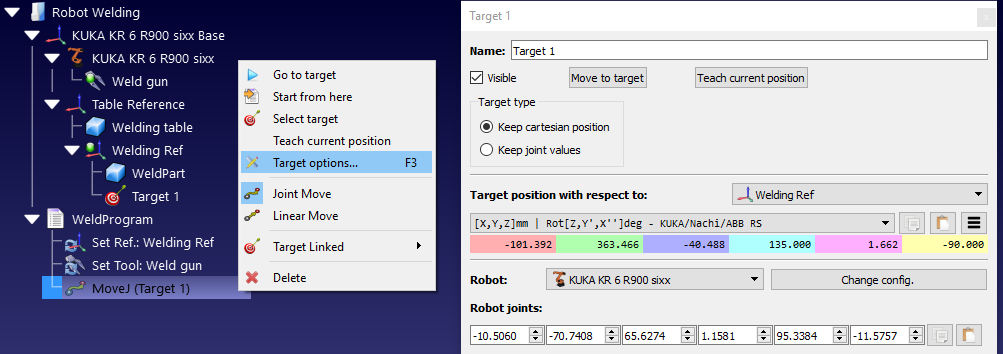
Unless a target is selected before adding the instruction, the movement instruction will create a new target and they will be linked. If the target is moved the movement is also modified.
If this is the first instruction that is added to the program, two more instructions will be added before the movement instruction: a Reference Frame selection and a Tool Frame selection. This will make sure that when the program reaches the movement instruction the robot is using the same reference and tool frames used to create this new target.