Robot Programs
Select Program➔![]() Move Linear Instruction to add a new linear movement instruction. Alternatively, select the corresponding button in the toolbar.
Move Linear Instruction to add a new linear movement instruction. Alternatively, select the corresponding button in the toolbar.
Unless a target is selected before adding the instruction, the movement instruction will create a new target and they will be linked. If the target is moved the movement is also modified.
Joint Moves and Linear Moves behave the same way and can be easily switched from one type to the other.
Same as with the Joint Move Instruction, if this is the first instruction that is added to a program, two more instructions will be added before the movement instruction: a Reference Frame selection and a Tool Frame selection.
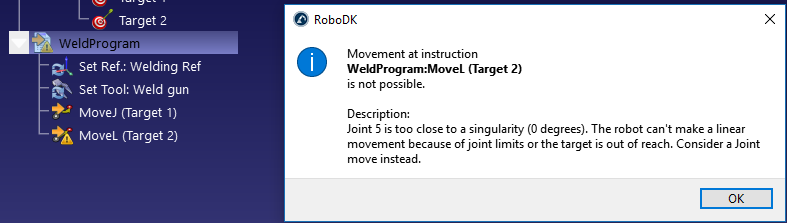
Contrary to Joint Movements, Linear Movements are sensible to robot singularities and axis limits. For example, 6-axis robots can’t cross a singularity following a linear move. The following image shows an example saying Joint 5 is too close to a singularity (0 degrees). […] Consider a Joint move instead. As shown in the following image.
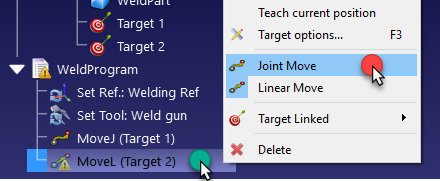
If a linear move is not strictly necessary, right click the movement instruction and change it to a Joint Instruction.
Alternatively, the target, the TCP or the position of the reference frame must be modified to avoid the singularity.