Robot Programs
Select Program➔![]() Set Rounding Instruction to alter the rounding accuracy. The rounding accuracy used to smooth the edges between consecutive movements. This change takes effect from the moment it is executed inside a program (same as with all the other instructions), so it is typical to set this value at the beginning of a program.
Set Rounding Instruction to alter the rounding accuracy. The rounding accuracy used to smooth the edges between consecutive movements. This change takes effect from the moment it is executed inside a program (same as with all the other instructions), so it is typical to set this value at the beginning of a program.
Without a rounding instruction, the robot will reach the speed of 0 at the end of each movement (unless the next movement is tangent with the previous movement). This will provoke high accelerations and quick speed changes to ensure the best accuracy for each movement.
This value is also known as Blending radius (Universal Robots), ZoneData (ABB robots), CNT/FINE (Fanuc robots), Cornering (Mecademic robots) or $APO.CDIS/$APO.CPTP/Advance (KUKA robots).
Some controllers require setting this value as a percentage, for example on a Fanuc controller, if you want to provide the command CNT5 you should enter the value 5.
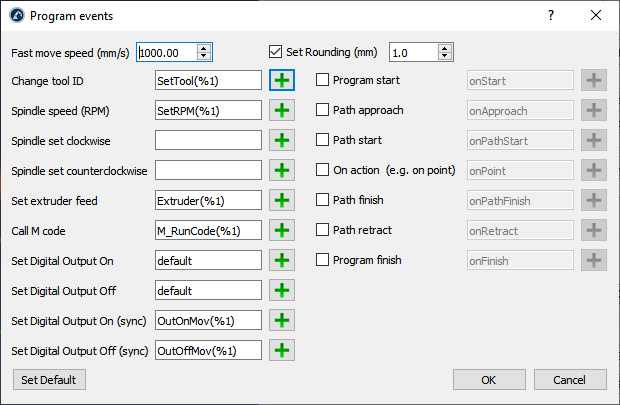
You can also specify the rounding parameter in the Program Events window if you are generating your programs for robot machining, 3D printing or curve/point following.
RoboDK’s path accuracy tests may allow to have a better understanding of the effects of different rounding strategies.