Robot Programs
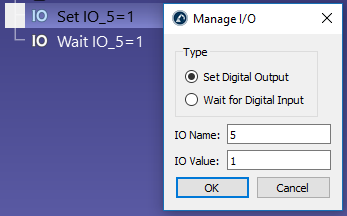
Select Program➔![]() Set or Wait I/O Instruction to change the state of Digital Outputs (DO). By default, this instruction is set to Set Digital Output. This instruction also allows waiting for a specific Digital Input (DI) to switch to a specific state.
Set or Wait I/O Instruction to change the state of Digital Outputs (DO). By default, this instruction is set to Set Digital Output. This instruction also allows waiting for a specific Digital Input (DI) to switch to a specific state.
The IO Name can be a number or a text value if it is a named variable. The IO Value can be a number (0 for False and 1 for True) or a text value if it is a named state.
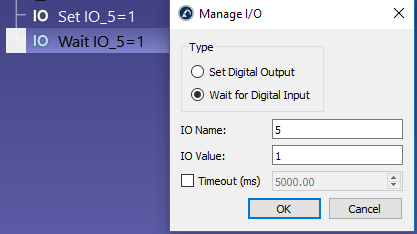
Set to Wait for Digital Input to stop the program execution until a specific input changes to a specific value. Furthermore, most robot controllers support a timeout delay to raise an error if the waiting time exceeds a specific value. Check the Timeout (ms) option to activate this feature.
Altering simulated Digital Inputs and Digital Outputs will create new station variables. To check the state of these variables you can right click the station and select Station Parameters. It is also possible to read or modify these variables through the API.