Robot Programs
Select Program➔![]() Simulation Event Instruction to provoke a specific simulation event. Simulation events have no impact on generated code and are used only to provoke a specific event for simulation purposes.
Simulation Event Instruction to provoke a specific simulation event. Simulation events have no impact on generated code and are used only to provoke a specific event for simulation purposes.
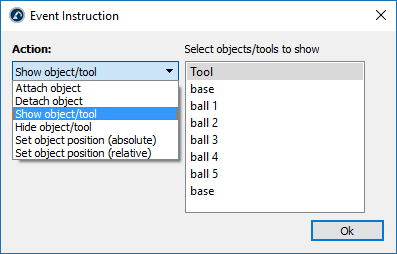
Simulation events using the graphical user interface allow you to:
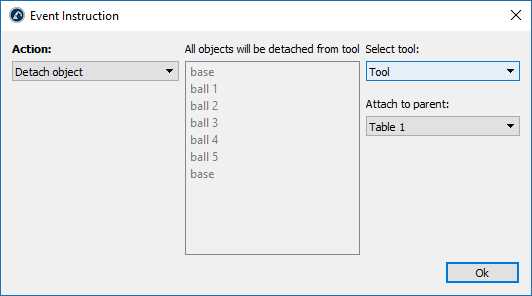
● attach or detach objects to robot tools
● show or hide objects or tools
● change the position of objects and reference frames
For example, if the robot moves to a specific location to grab an object we can set up an Attach object event to move that object together with the robot. Then, after the robot has moved and it is ready to leave the objects we can set up a Detach object event to leave any objects the tool has grabbed.