ABB robots
The following steps allow creating or modifying robot tools (TCP, also known as tooldata in ABB robot programming):
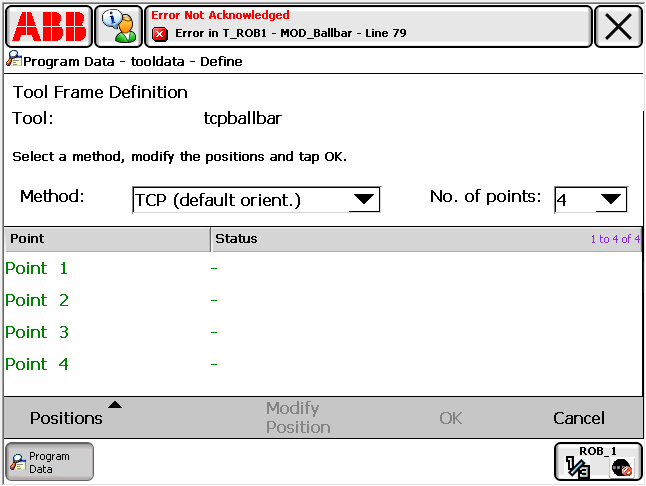
1.Select ABB➔Program data➔tooldata (double click)
2.It is possible to create or modify existing tool variables
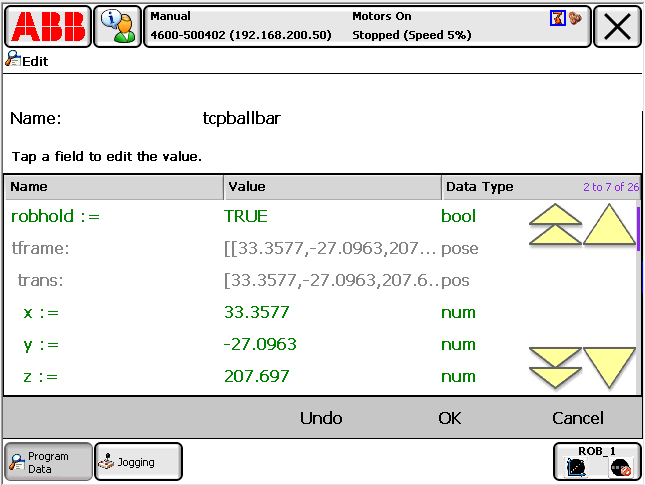
3.Once the tool has been defined the X,Y,Z values of the TCP can be retrieved