Fanuc robots
This section explains the difference between Fanuc LS and TP program files and how to automatically compile programs for Fanuc robots using RoboDK.
A binary file is required to run robot programs on Fanuc robots (TP, also known as TPP). Programs for Fanuc robots generated by offline programming software (such as RoboDK) are in LS format (ASCII, text-readable and not compiled). There are two options to convert LS robot programs to TP programs:
1.Have the ASCII Upload software option on the robot. This option might be available on the robot already. The best way to check if this option is available is to provide an LS file to the robot and it should be automatically converted to a TP file. For example, place the file on the FR disk and select LOAD on the teach pendant.
2.Compile the program using the WinOLPC tools from Roboguide. In this case, the same computer where RoboDK is installed can compile the LS program automatically using the “maketp.exe” compiler tool from Fanuc. This command requires a « robot.ini » file. This file can be generated with the setrobot.exe utility from WinOLPC if Roboguide was installed and a work station was saved on the computer (“Work Cell”).
If you have Roboguide WinOLPC tools installed in the default location, RoboDK automatically TP programs automatically right after an LS program is generated.
Make sure you have selected a robot using the setrobot executable file. If the TP file is not generated and you have Roboguide WinOLPC installed, you may need to follow these steps:
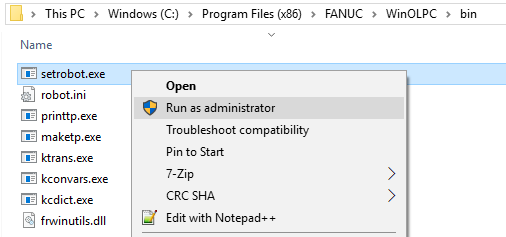
1.Open windows explorer and navigate to the WinOLPC installation folder:
C:\Program Files (x86)\FANUC\WinOLPC\bin
2.Right click the setrobot.exe file and select Run as administrator
3.Select the robot Work Cell (a Roboguide WorkCell is required)
Alternatively, the contents on the following folder can be copied from the default folder:
C:\Program Files (x86)\FANUC\WinOLPC\bin
to the folder:
C:\RoboDK\api\Fanuc
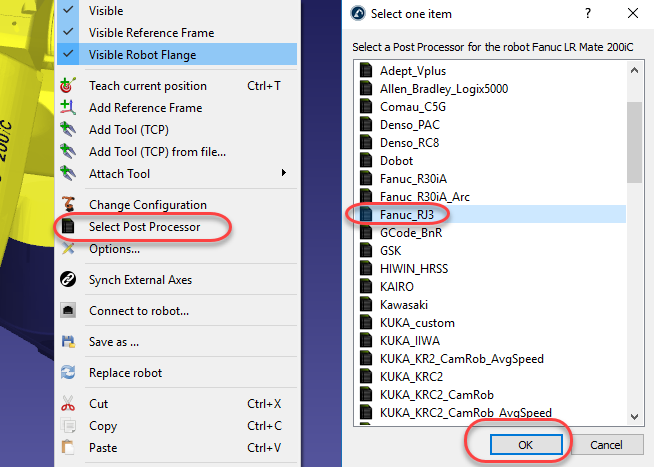
Follow these steps to select a post processor compatible with Fanuc RJ3 controllers:
1.Right click the robot
2.Select Select Post Processor
3.Select Fanuc RJ3
4.Generate your program (F6)
Follow these steps if you did not install Roboguide WinOLPC in the default location and you want to obtain a TP file automatically when you generate a program from RoboDK:
1.Select Program➔Add/Edit post processor
2.Select Fanuc RJ3 (or the post processor you would like to use). All post processors are also accessible via the folder: C:/RoboDK/Posts/. Also, make sure you are not using a compiled post processor.
3.Locate the variable PATH_MAKE_TP (around line 103) and enter the path where the maketp executable is located.
RoboDK post processors for Fanuc robots support using 6 axis robots synchronized with external axes such as turntables or linear axes.