Han’s robots
This section of the documentation provides an overview of the typical operation of Han’s robots using RoboDK to send a program to the Han’s controller.
You can manually import robot programs generated from RoboDK to your Han’s robot controller.
You should follow these steps to import a RoboDK program into Han’s Controller:
1.Launch the Han’s controller and connect to the robot.
2.In RoboDK, Right-click the program you want to import and select Generate Robot Program as….
3.RoboDK will prompt you to save two files, one is a line-by-line script of the commands that will be sent to the controller and the other a .json file to be uploaded to the controller.
4.Select the location you would like to save each file; the .json file can be saved into a USB disk to be imported to the controller as a program.
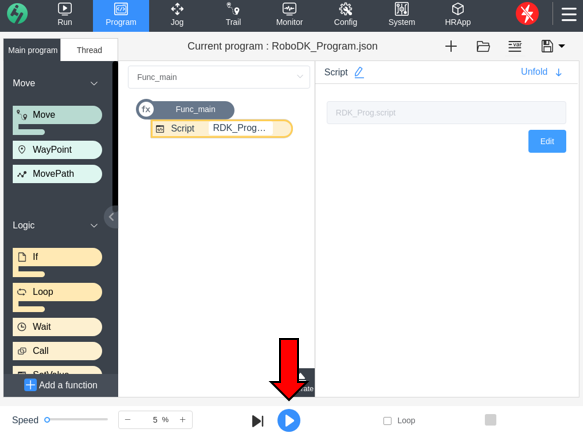
5.In the controller, navigate to the Program tab.
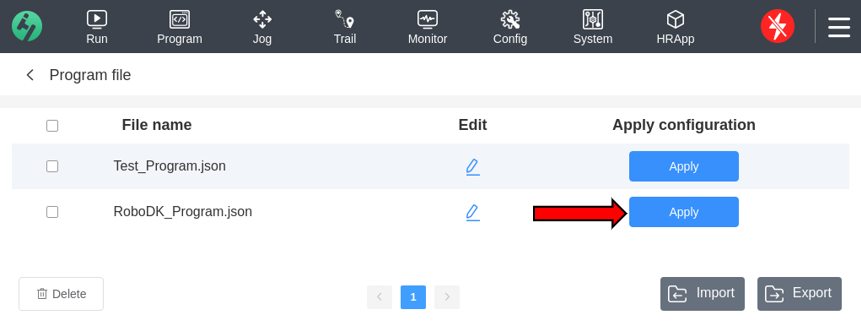
6.To the right of the “Current program” name is a folder icon. Select this icon to open the Program file list.
7.Select the “Import” button at the bottom of the list.

8.Locate the .json file generated by RoboDK on the USB and select it.
9.Click on “Apply” to set the imported program as the active program.
10. The RoboDK program will be imported as a function calling a script.
11. Select the Blue start button to start running the program on the robot.