JAKA robots
The following steps show how to manually configure the robot reference frame in the JAKA Zu app.
First, you should create a custom JAKA Zu frame:
1.In JAKA Zu, navigate to Settings ➔ Operation Settings ➔ User Coordinate System.
2.Click on the edit button to set X, Y, Z, RX, RY, and RZ values for a custom frame.
3.Select confirm to save the frame to JAKA Zu.
Then, you should replace the imported frame by the JAKA Zu frame:
4.Follow the steps listed in Send a Program to JAKA Zu.
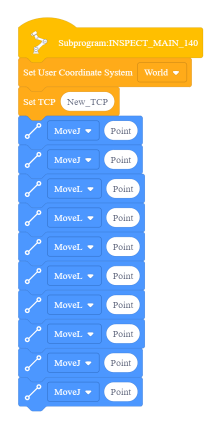
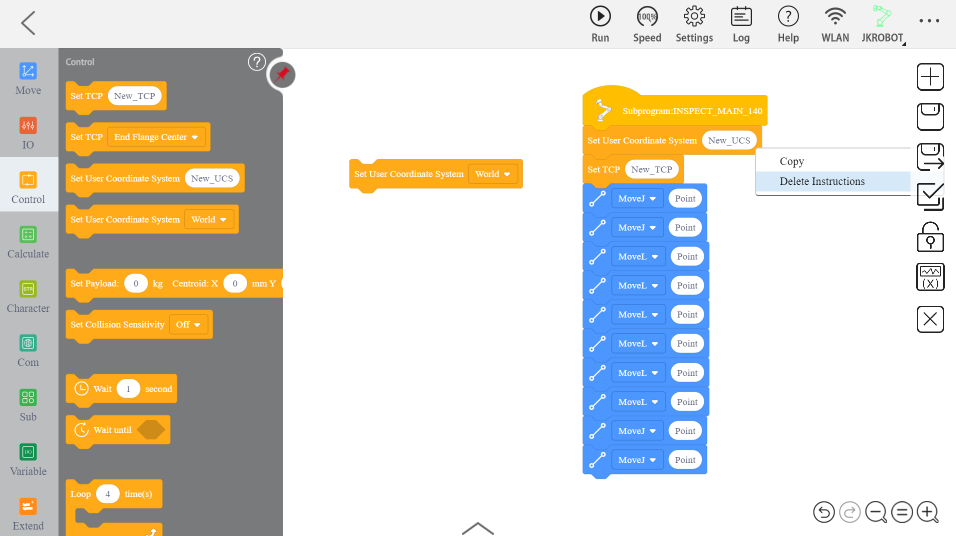
5.Open the Control tab in the sidebar and locate the “Set User Coordinate System” tile containing the dropdown box.
6.Remove the “New_UCS” tile that was automatically imported by right clicking it and selecting delete.
7.Replace the removed tile with the “Set User Coordinate System” tile and select the custom frame from the dropdown.