JAKA robots
A connection between RoboDK and the JAKA robot can be established to move the robot automatically from a connected PC using RoboDK. This allows using the RoboDK Run on robot option for online programming and debugging. The connection can be established through a standard Ethernet connection (TCP/IP).
Follow these steps to set up the RoboDK driver for JAKA online programming:
1.Launch the JAKA Zu app and connect to the robot in the JAKA Zu app.
2.Power on and enable the JAKA Zu robot.
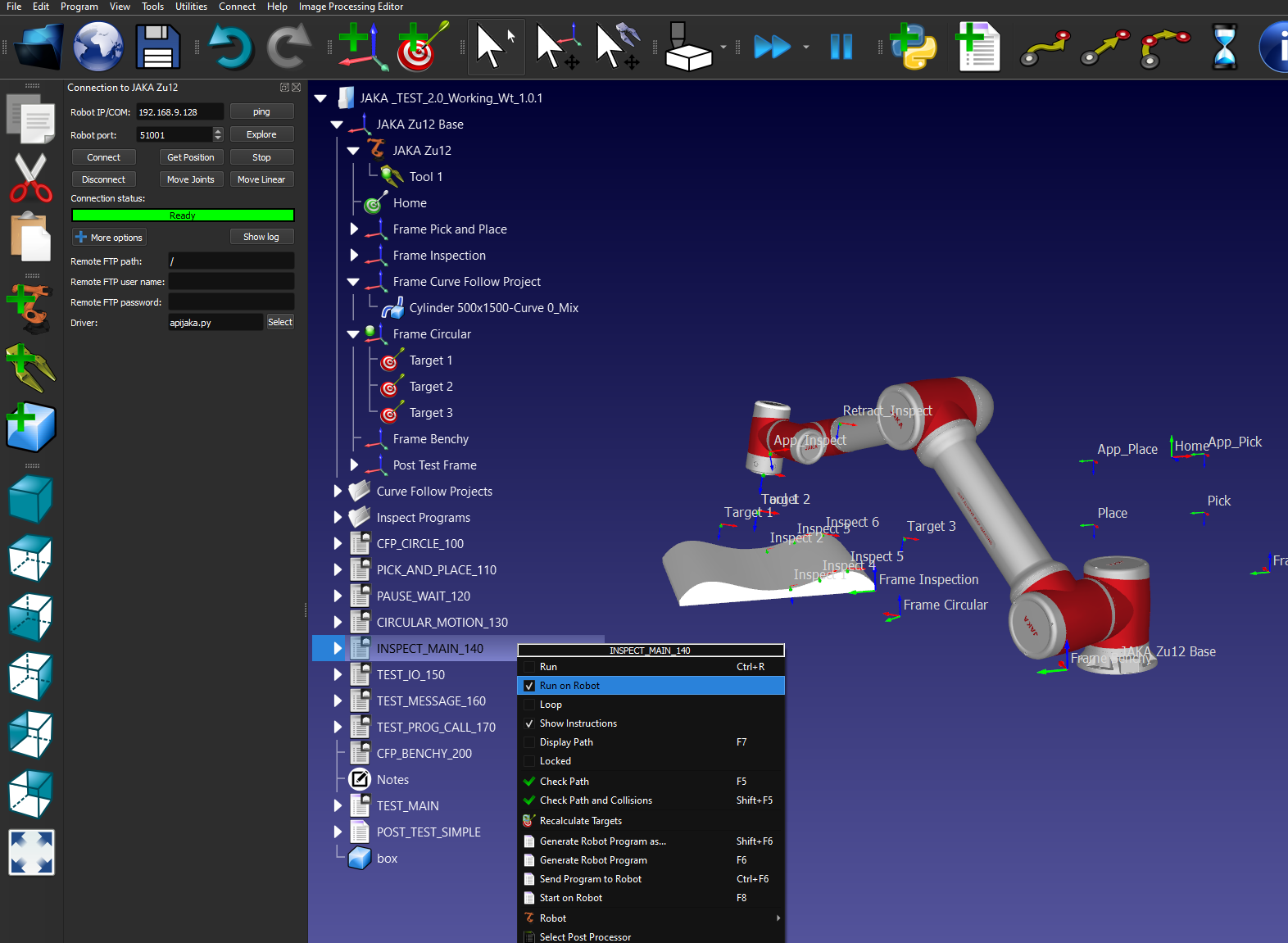
3.In the RoboDK toolbar, select Connect ➔ Connect Robot.
4.Under “More options”, select the JAKA driver: apijaka.py.
5.Use your robot IP and port to connect the robot in RoboDK.
6.You can now move the JAKA robot directly from RoboDK
a.To move the robot to a target in RoboDK, double click the target in in the station tree and select the “Move Joints” or “Move Linear” buttons in the connection interface to effectuate a joint or linear move to the target.
b.To run a program on the robot using the driver, right click on the desired program and select the “Run on Robot” option. Then, double click the program to run it on the robot.