KUKA robots
Prerequisites: RoboDK version 5.5.2 or higher, Windows operating system, installation path C:\RoboDK.
1.Open command shell with START➔All programs➔ Accessories➔Command Prompt
or START➔Run➔cmd.
2.Change directory to C:\RoboDK\bin and launch kukabridge.exe by executing following commands:
c:
cd C:\RoboDK\bin
..\api\Robot\kukabridge.exe
3.Now KUKA Bridge Driver is running in interactive mode.
4.Establish a connection to the control system by entering CONNECT <robot IP address> <port> <number of robot axes>, e.g:
CONNECT 172.1.1.10 7000 6
5.If successful, you will see the following output:
SMS:Connecting
Connected
SMS:Working...
SMS:Ready
6.Request current robot joint position by typing the CJNT command:
CJNT
SMS:Working...
JNTS 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
SMS:Ready
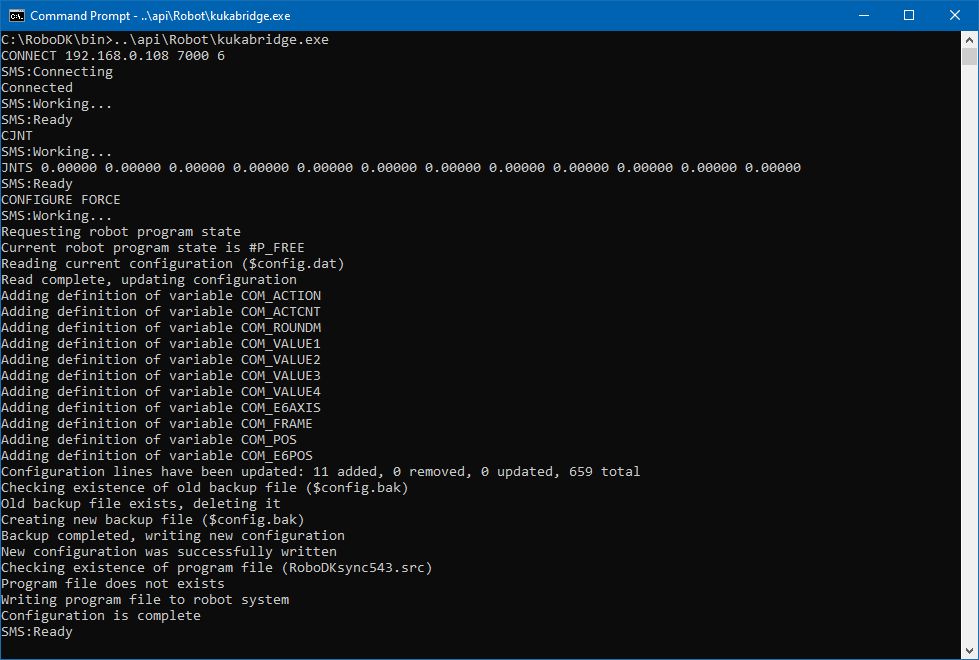
7.Perform automatic configuration with the CONFIGURE FORCE command:
CONFIGURE FORCE
SMS:Working...
Requesting robot program state
Current robot program state is #P_FREE
Reading current configuration ($config.dat)
Read complete, updating configuration
Adding definition of variable COM_ACTION
Adding definition of variable COM_ACTCNT
Adding definition of variable COM_ROUNDM
Adding definition of variable COM_VALUE1
Adding definition of variable COM_VALUE2
Adding definition of variable COM_VALUE3
Adding definition of variable COM_VALUE4
Adding definition of variable COM_E6AXIS
Adding definition of variable COM_FRAME
Adding definition of variable COM_POS
Adding definition of variable COM_E6POS
Configuration lines have been updated: 11 added, 0 removed, 0 updated, 659 total
Checking existence of old backup file ($config.bak)
Old backup file exists, deleting it
Creating new backup file ($config.bak)
Backup completed, writing new configuration
New configuration was successfully written
Checking existence of program file (RoboDKsync543.src)
Program file does not exists
Writing program file to robot system
Configuration is complete
SMS:Ready
8.Now your robot is ready to work, all you have to do is select and run the program RoboDKsync543.src.