The following steps allow you to create or modify robot tools (TCP) from your robot controller, also known as $TOOL in KUKA KRC robot programming):
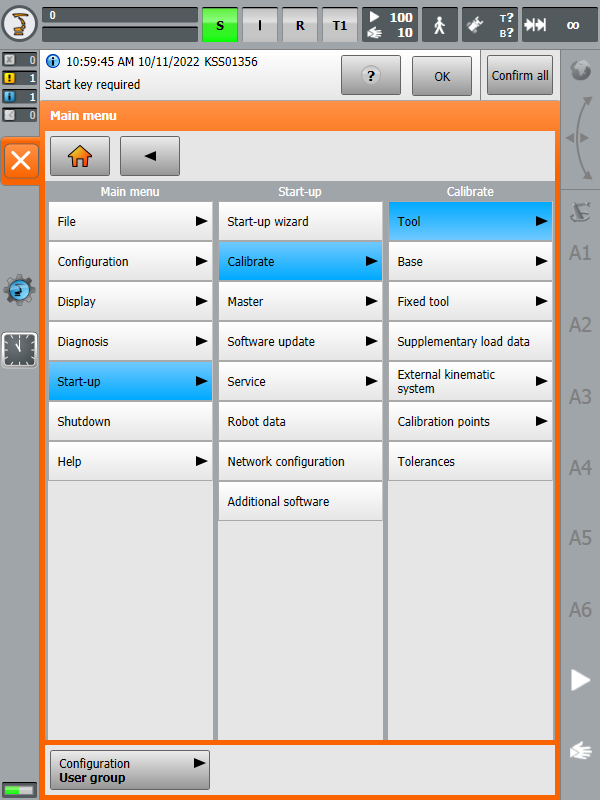
1.Select ![Robots KUKA - Image 6]() KUKA➔Start-up➔Calibrate➔Tool
KUKA➔Start-up➔Calibrate➔Tool
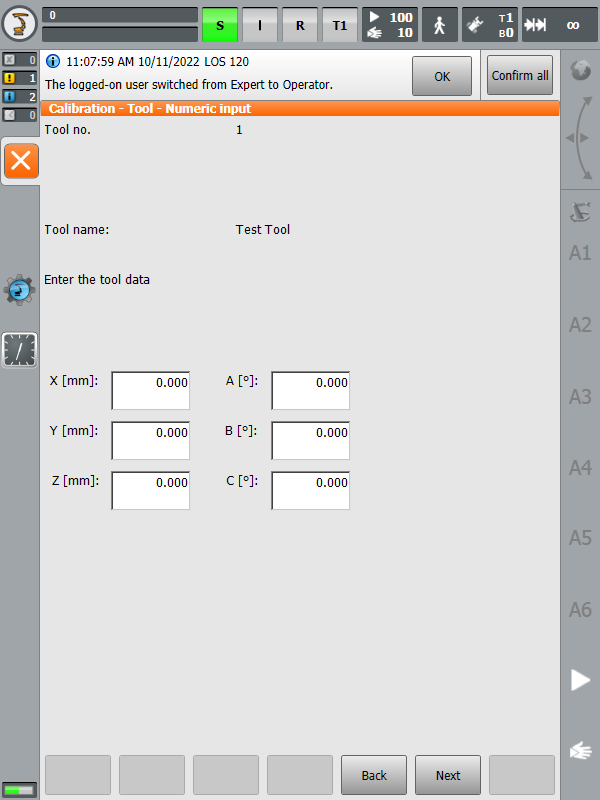
2.Select a tool and edit or retrieve the X,Y,Z position of the TCP.
![Robots KUKA - Image 7]()
![Robots KUKA - Image 8]()