The following steps allow you to retrieve the robot joints from your robot:
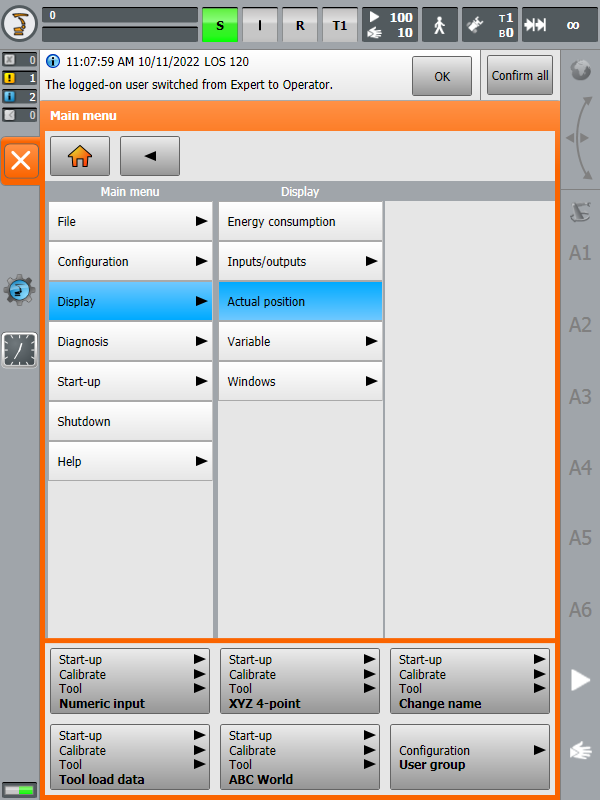
1.Select ![Robots KUKA - Image 9]() KUKA➔Display➔Actual position
KUKA➔Display➔Actual position
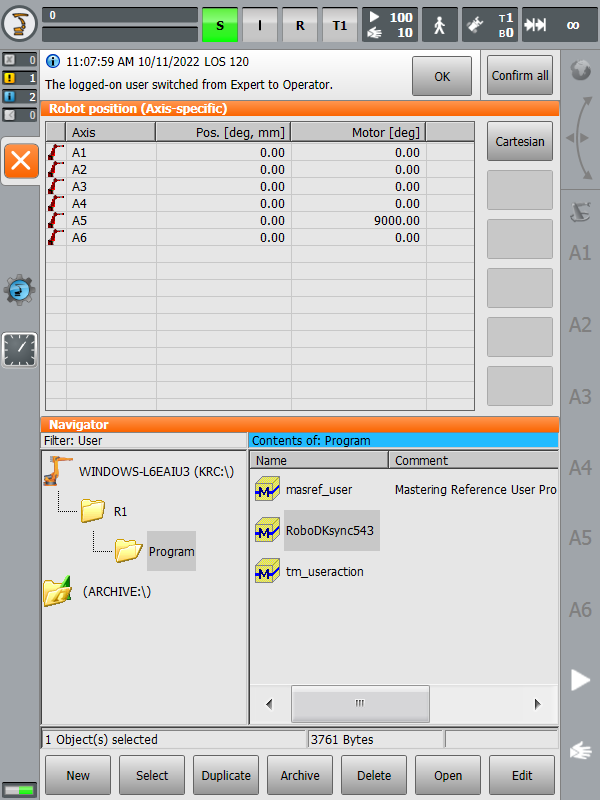
2.Select Joints mode and use the left column to take the robot joints
![Robots KUKA - Image 10]()
![Robots KUKA - Image 11]()
Tip: It is possible to retrieve the robot joints more accurately (5 decimal precision) by monitoring the $AXIS_ACT variable or simply using the RoboDK robot driver for KUKA and selecting the Get robot joints button