Mecademic
This section provides other useful information when programming Mecademic Meca500 robots.
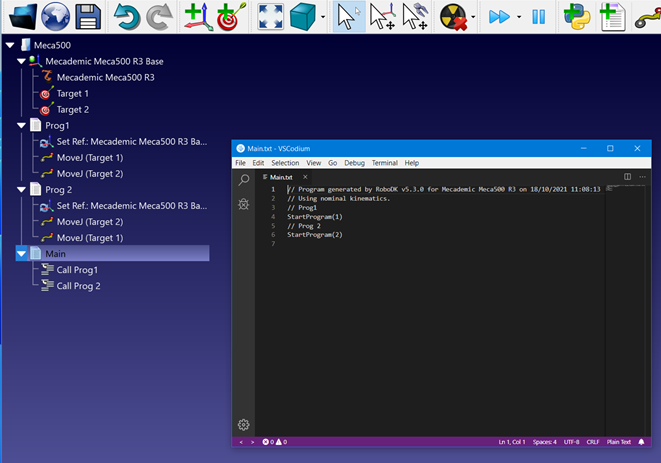
Offline programs are persistent on the robot and callable using their respective program number. You can automate the program number selection by adding it to the program name.
RoboDK will automatically retrieve the ID and use it to call the program. This also applies to subroutines, see the example below.
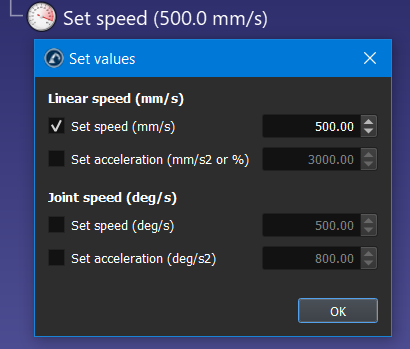
The joint speed and linear and joint accelerations units for Mecademic robots should be provided as a percentage value (%), contrary to other units displayed in the set speed instruction menu.
The linear speed is correct and needs to be provided in mm/s.