Universal Robots
The IP of the robot is required execute programs directly from the RoboDK simulator. It is also possible to transfer program files through FTP.
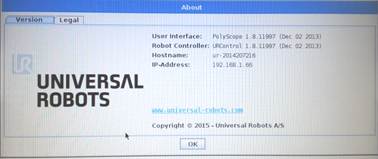
The IP of the robot can be retrieved from the About menu in the UR’s teach pendant main screen.
The robot must be connected to the computer through an Ethernet connection (direct connection or through a network). A Ping test allows testing if the Network link has properly been stablished.