Universal Robots
Once your RoboDK simulation is ready you can generate a SCRIPT and/or a URP program. These two files can be executed by the robot controller. Follow these steps to generate a SCRIPT and a URP program from your robot simulation:
1.Right click a program (Print3D in this example)
2.Select Generate robot program F6
The program will be displayed in a text editor (this behavior can be changed in the menu: Tools➔Options➔Program).

Transferring the SCRIPT and URP files can be done through SFTP transfer or a USB drive.
The following steps summarize the procedure to load a URP file on the Universal Robots robot.
1.Right click the program and select Select Post Processor
2.Select Universal Robots URP
These first 2 steps are optional as the default post also generates a URP file, however, it will allow you to generate a user-readable URP program instead of a URP program that executes a script file.
3.Right click the program and select Generate robot program (F6)
4.Save the generated URP file(s) to a USB memory disk.
5.Connect the USB memory disk to the robot teach pendant (UR’s Polyscope)
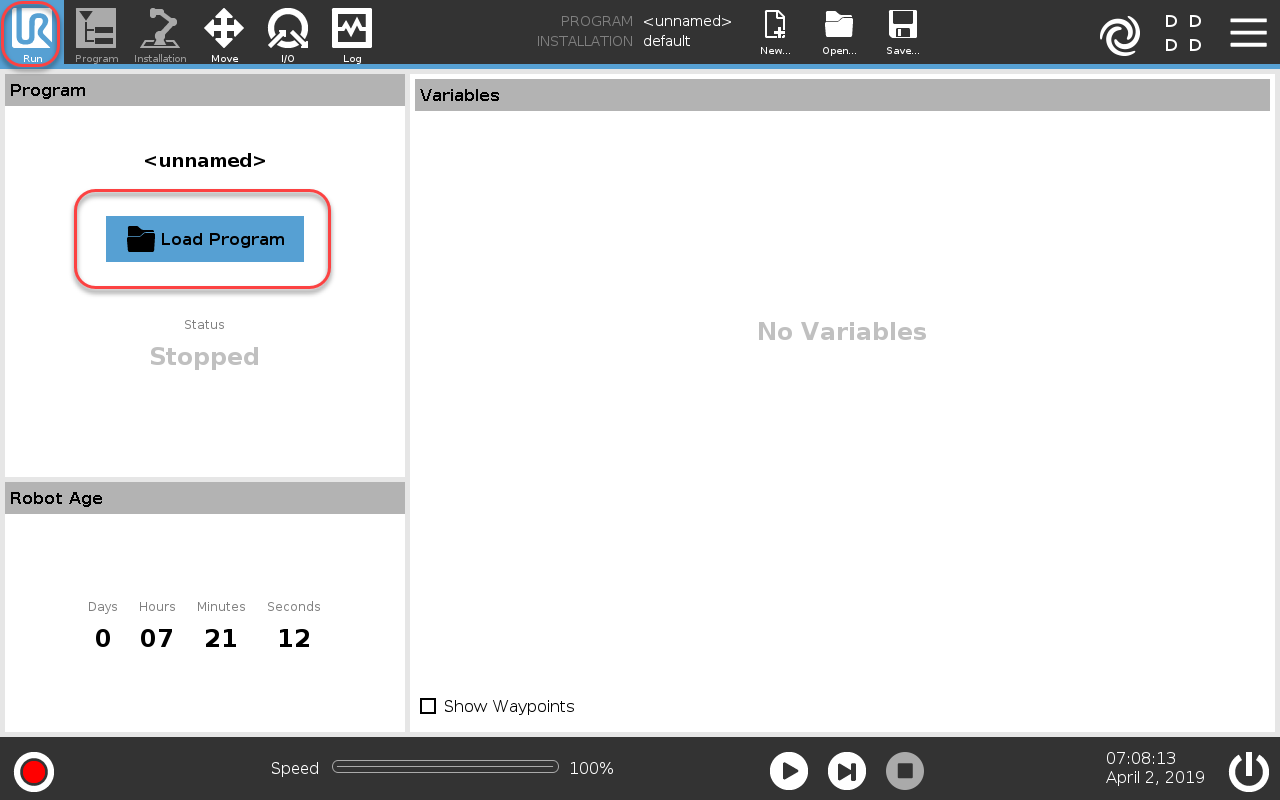
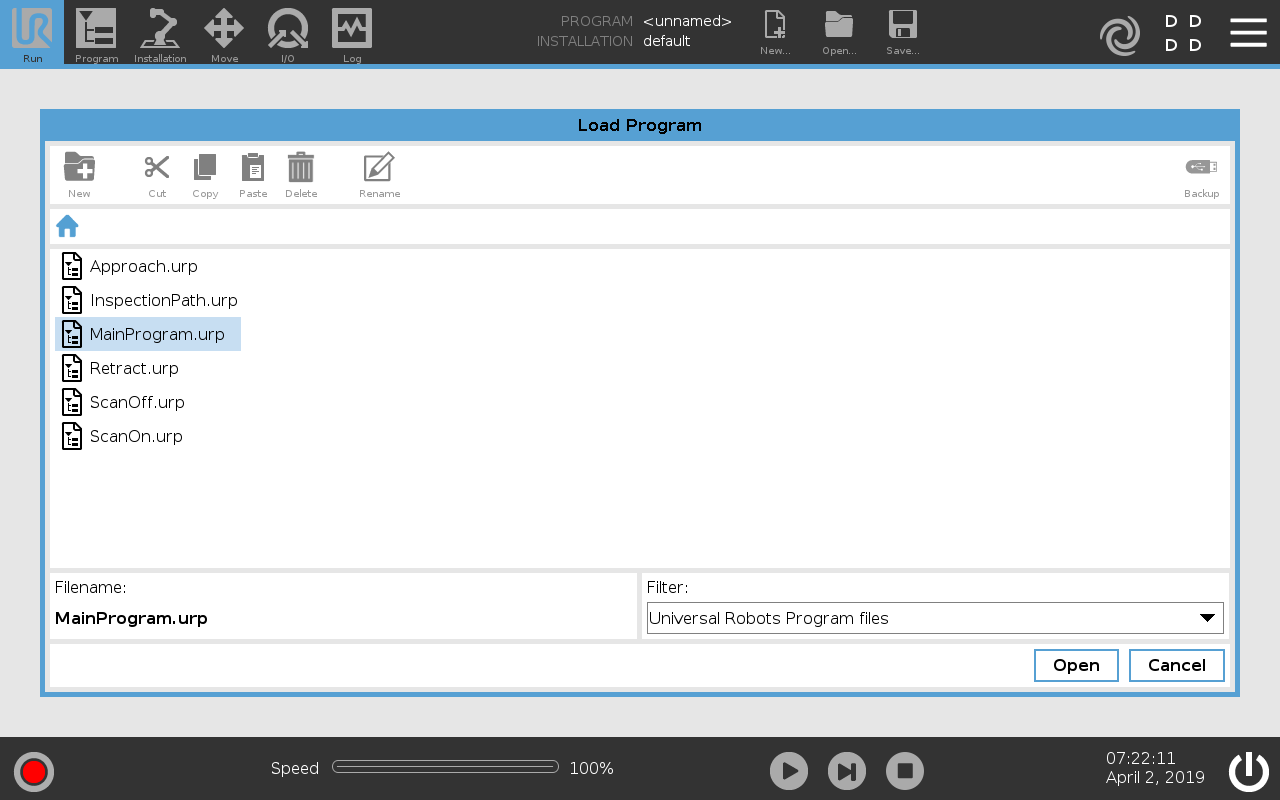
6.On the robot teach pendant: Select the Run tab
7.Select Load Program and load the program generated from RoboDK
8.Select the Program tab and select the Play button to start it
9.Select the Play button to start the program.

The following steps and images summarize the procedure to execute a SCRIPT program on the robot. These steps are not required to run a URP program file:
1.Select Program Robot on the main screen of the teach pendant
2.Select Empty Program
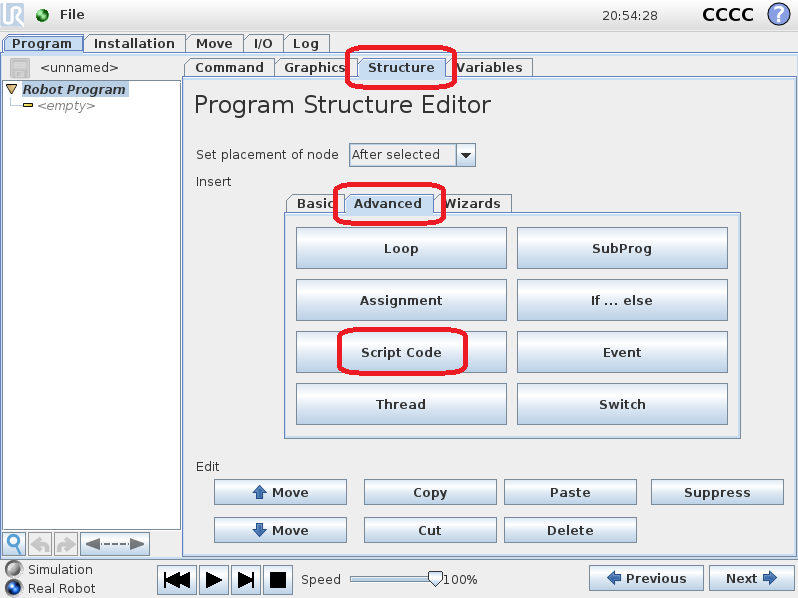
3.Select the Structure tab
4.Select the Advanced tab
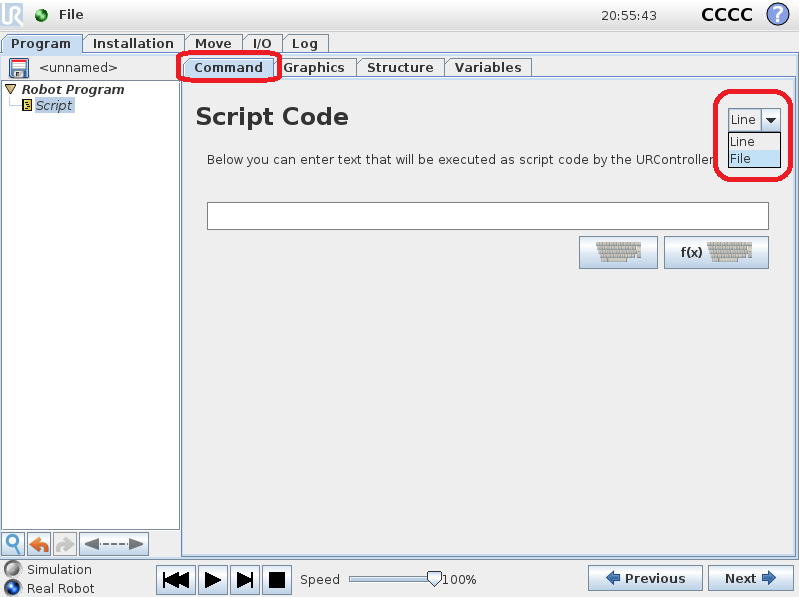
5.Select Script code
6.Select File (as shown in the image)
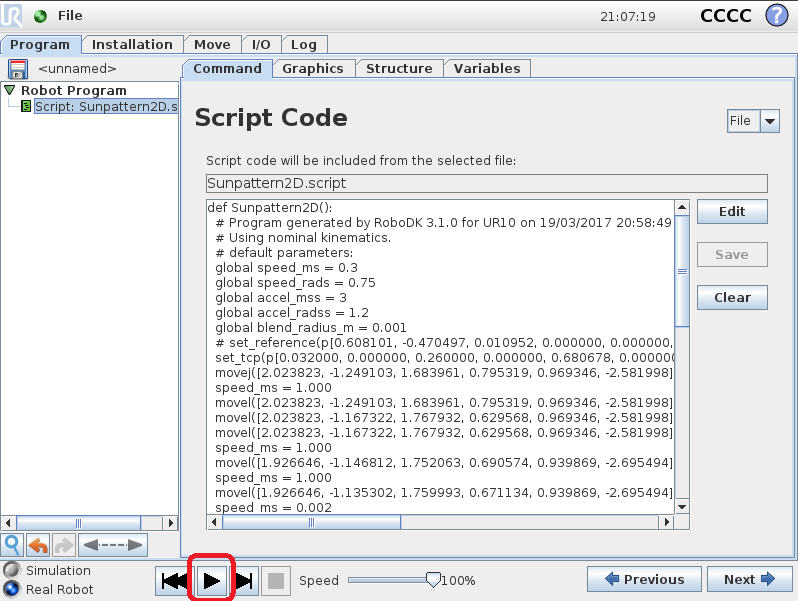
7.Select the script file generated by RoboDK
8.Select the play icon to run the program
9.Select File➔Save to save the changes
10. Finally, the program can be executed