Universal Robots
You can test the connection between RoboDK and the Universal Robots controller by using URSim.
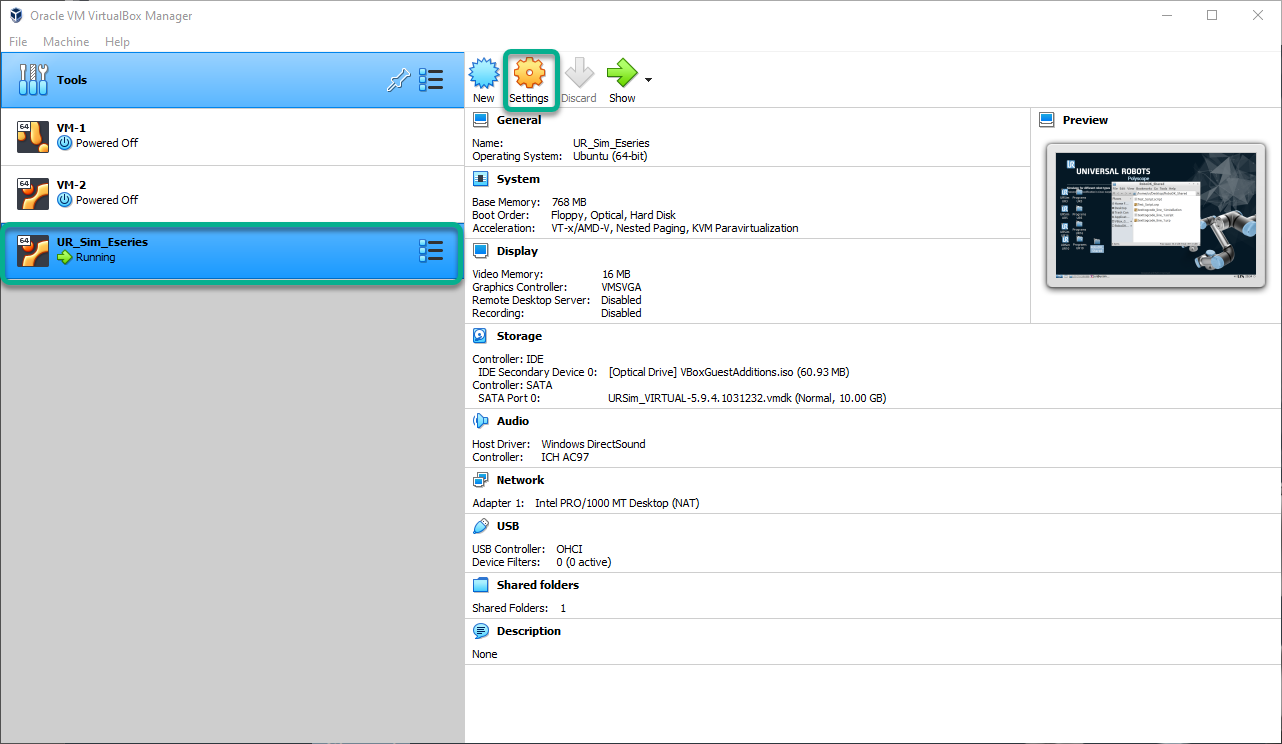
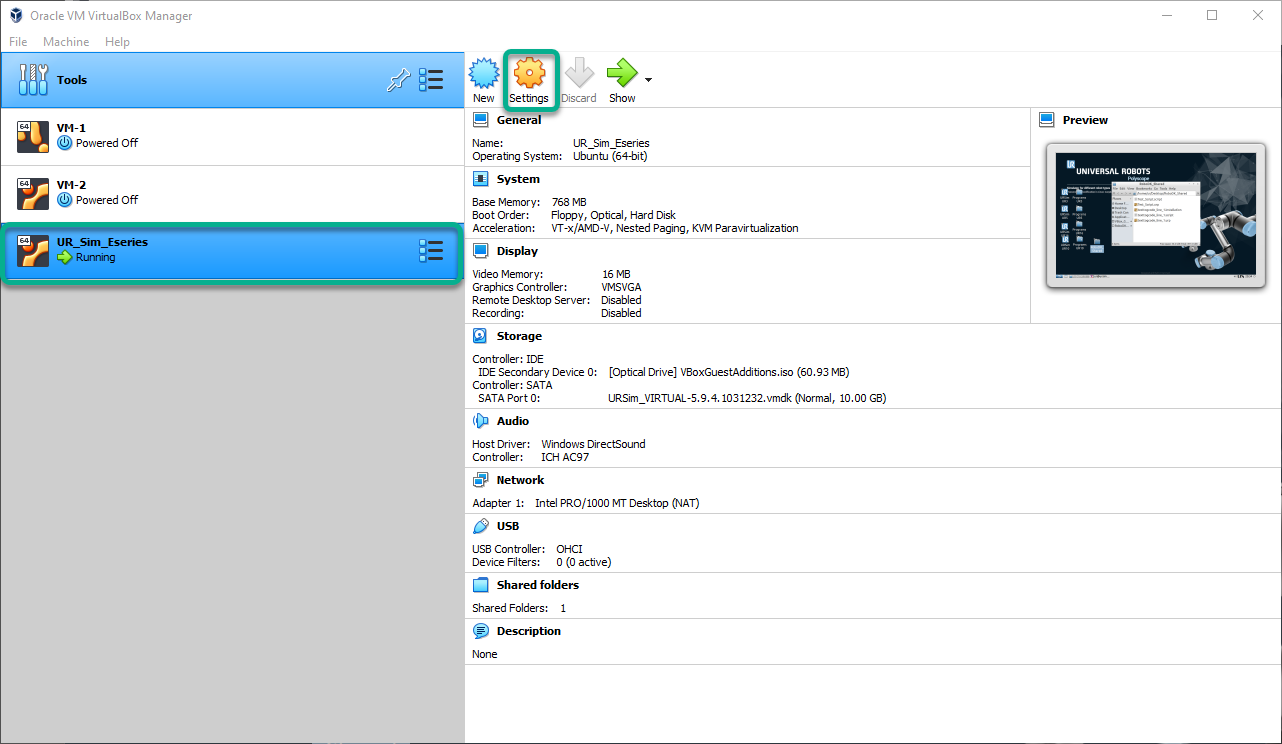
1.In the Oracle VM VirtualBox Manager.
2.Select the UR_Sim_Eseries VM and press Settings.
3.Select Network➔Attached to: and select Bridge Adapter and press OK.
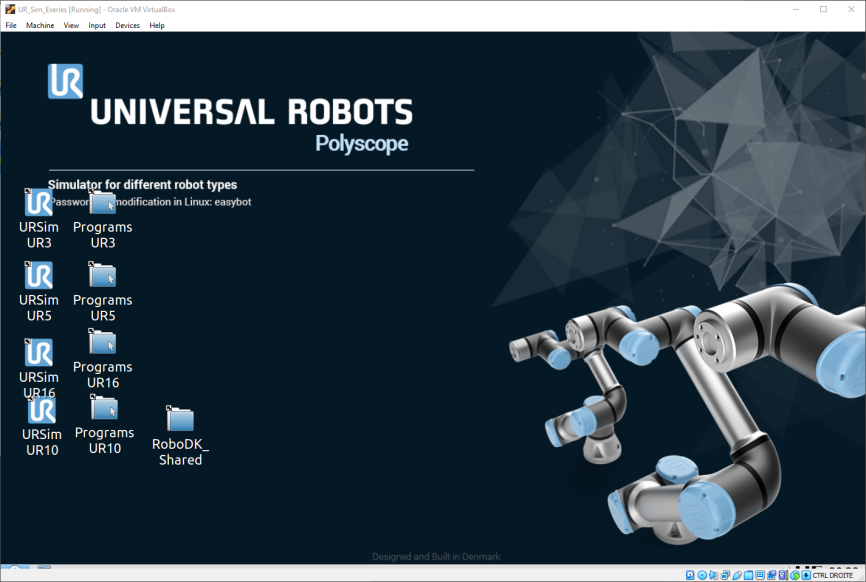
4.Launch the URSim Virtual Machine.

5.Launch Polyscope with your preferred UR model.
8. Retrieve the simulator IP address.
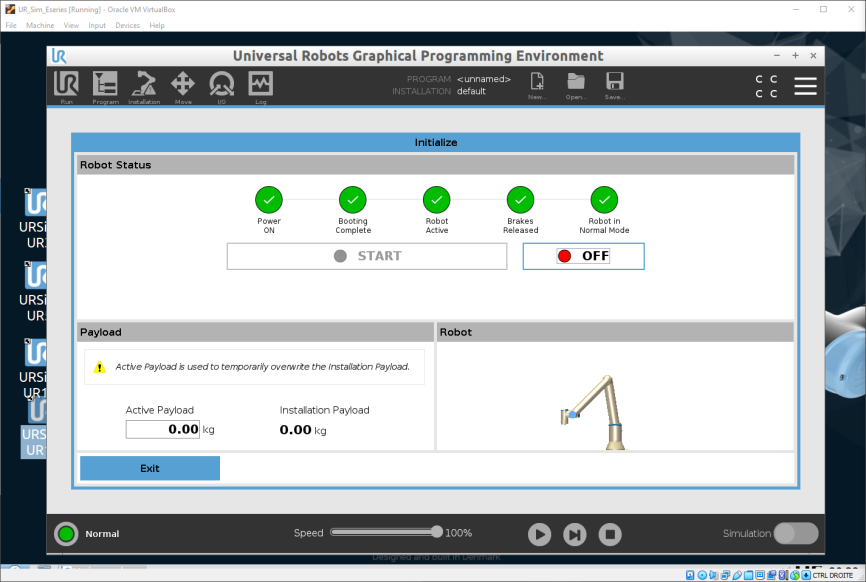
9. Go to the “Move” window of the URSim.

10. Open in RoboDK station with the same UR model.
11. Select Connect➔Connect Robot.

12. Enter the UR Sim IP address and press Connect.
13. Use Get Position to retrieve the position of the URSim robot and apply it to RoboDK.
14. Use Move Joints to move the URSim robot to the position of the RoboDK robot.
15. Right-click a RoboDK program, select “Run on robot” and “Run” to run the program simultaneously in RoboDK and un URSim.