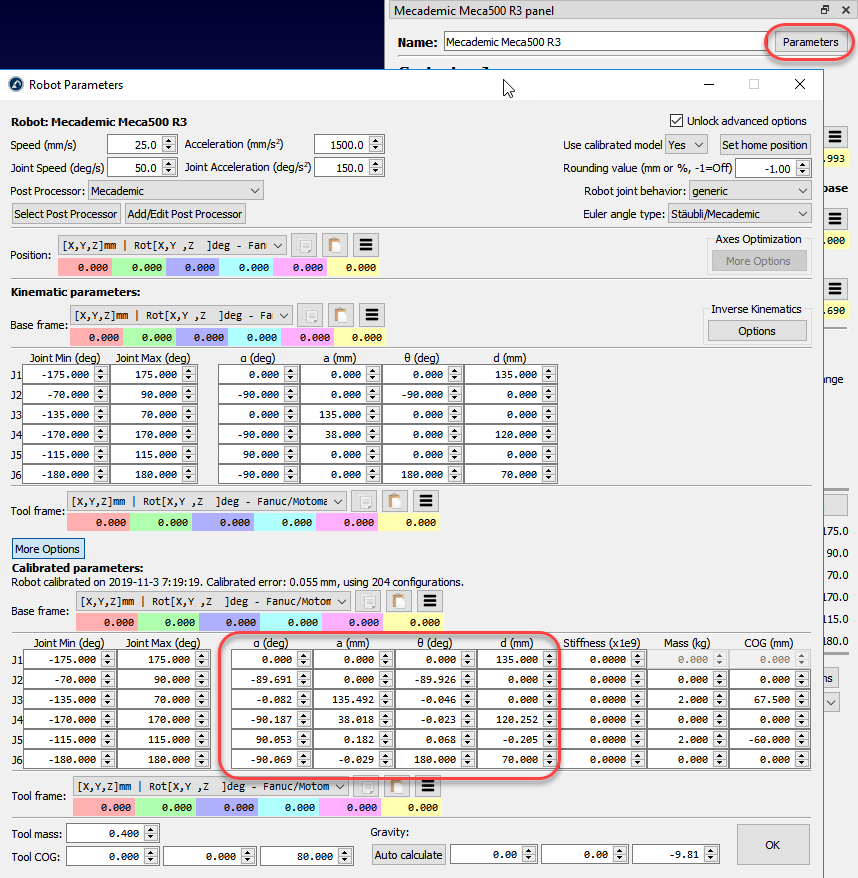
You can access the calibrated parameters in the Parameters menu once a robot has been calibrated. Some robot controllers allow modifying certain robot parameters.
Note: RoboDK uses the Denatit-Hartenberg Modified convention. Make sure to use all selected/calibrated parameters.
Important: We should make sure we don’t generate filtered programs if we update the robot controller parameters.
![TwinTrack - Image 21]()