RoboDK TwinTrack
You can use the teach by demonstration features without a real robot. This means you can simulate and program your robot offline only with your measurement system before you have access to the real robot.
You simply need a part with a well-defined coordinate system that you can use as a reference.
Once you have the measurement system and your part ready you can follow these steps to define the coordinate system of your measurement device:
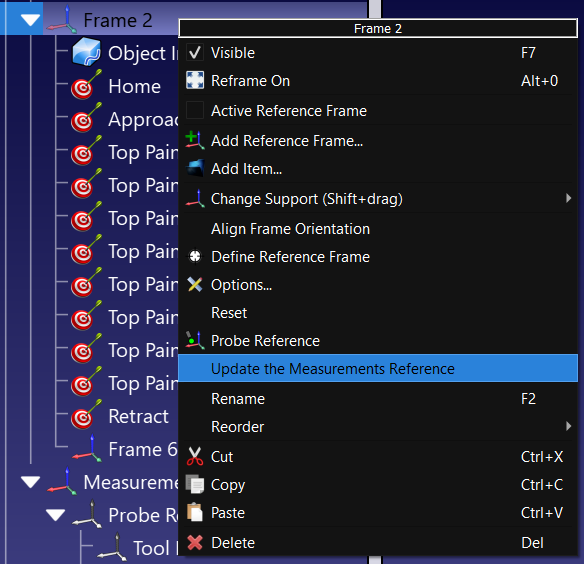
1.Right click the coordinate system of your part (or the coordinate system of jig it is attached to).
2.Select Update the Measurements Reference.
3.Follow the instructions on the screen to teach 3 points that define the coordinate system: the origin, a point on X+ and a point on Y+.
The measurement system will be updated accordingly, and you can proceed to teach points, curves or other coordinate systems.