RoboDK TwinTrack
To use the TwinTrack system you need to load your robot in RoboDK and connect to the robot and the measurement system. We can optionally model the cell by adding the 3D models of objects and tools. This will help prevent collisions.
8.Load the robot:
a.Select File➔Open online library. The online library will show up in RoboDK.
b.Use the filters to find your robot.
c. Select Download to automatically load the robot in your RoboDK station.
d.Alternatively, download the robot file directly from the online library (https://robodk.com/library) and open the file with RoboDK (.robot file).
9.Connect the measurement system:
a.Connect the measurement system to your computer.
b.Select Connect and connect to your measurement system. Make sure required software is also installed. You may have to the IP of the tracker depending on the measurement system you use.

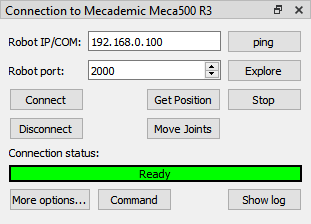
10. Connect the robot:
a.Select Connect➔Connect robot.
b.Enter the robot IP and port.
c. Select Connect.