RoboDK TwinTrack
You can create a curves, targets and coordinate systems on a moving object if your measurement system supports tracking multiple objects at the same time. This can be done following the same procedure as if they were static.
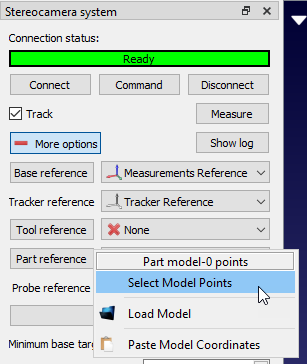
The main difference is that the moving object needs to be tracked in real time (using a tracker or reflective targets). For example, if you use the Creaform C-Track measurement system you should specify the model in the part reference section and link it to the coordinate system it represents.
The correct dependency of coordinate systems and objects needs to be defined in RoboDK so you can define new coordinate systems relative to your moving target.
This method of programming parts may not be as accurate as when the parts are static.