RoboDK TwinTrack
With RoboDK TwinTrack you can create robot targets manually by teaching points with your probe.
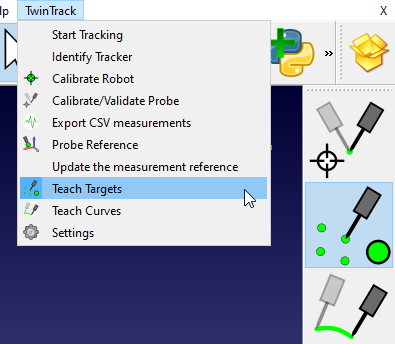
You can start the teach targets mode by selecting TwinTrack➔Teach Targets. This button is also available in the TwinTrack toolbar by default.
RoboDK calculates and displays the robot position in real time based on the position of your hand. You can easily see what areas are reachable by your robot.
With the create targets option you will be teaching one target with every push of a button. Once you want to create a program, you can push the second button of your probe and RoboDK will simulate the program:
● First button: teach targets.
● Second button: create and simulate the program in RoboDK.
● Hold the second button: run the program on the robot.