ISO9283 Performance Testing
ISO 표준 "ISO 9283: 산업용로봇조작-성능기준및관련테스트방법"에는산업용로봇의성능을평가하기위한테스트가설명되어있습니다. 무엇보다도로봇위치정확도, 반복성및경로정확도를올바르게측정하는절차를제공합니다.
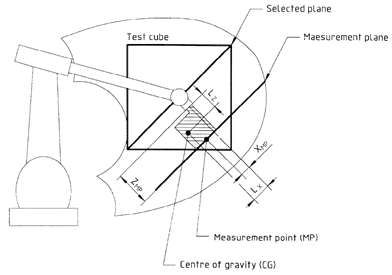
ISO 9283 표준에따르면모든테스트는소위 ISO 테스트큐브내부에서수행해야합니다. ISO 테스트큐브는로봇작업공간에들어갈수있는가장큰큐브이어야합니다. 또한, 위치정확도와반복성은30가지5가지구성으로측정해야합니다. 현대로봇에대한5가지구성으로는정확도의적절한측정을제공하기에충분하지않다는것은잘알려져있습니다.
대부분의로봇제조업체는로봇이보정된경우에만로봇위치정확도를제공하며, 또한적절한위치정확도통계를제공하기위해최소100개의서로다른구성을사용합니다. 산업용로봇은반복성이높지만정확하지는않습니다. 따라서보정을통해산업용로봇의정확도를향상할수있습니다.

80년대의전형적인로봇작업공간현대로봇의전형적인로봇작업공간
그러나ISO 9283 표준은로봇을보정하지않은경우에도반복성및경로정확도테스트에종종사용됩니다.

RoboDK를사용하여경로정확도를테스트하는다음영상을참고하십시오. https://youtu.be/yMQjqAQY1iE.
RoboDK를사용하여로봇을보정하고보정전후의성능을테스트할수있습니다. 마지막으로 RoboDK를사용하여볼바테스트를통해보정전후로봇의정확도를테스트할수도있습니다.