一体化解决方案
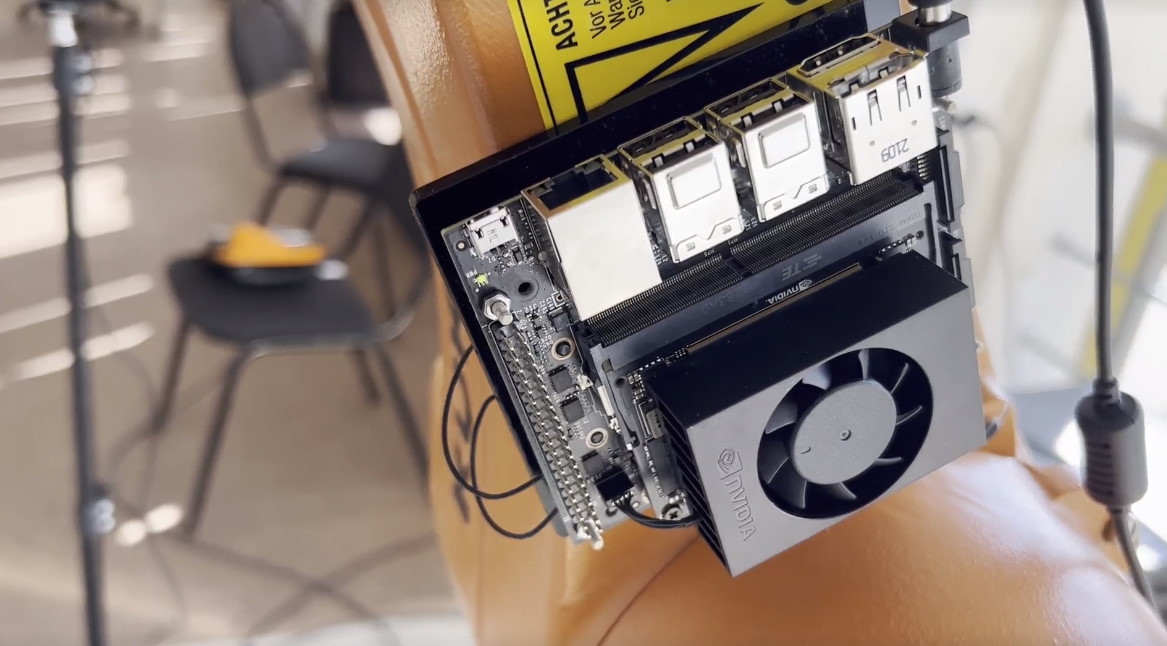
体积小巧、性价比高、易于安装
包含RoboDK API功能
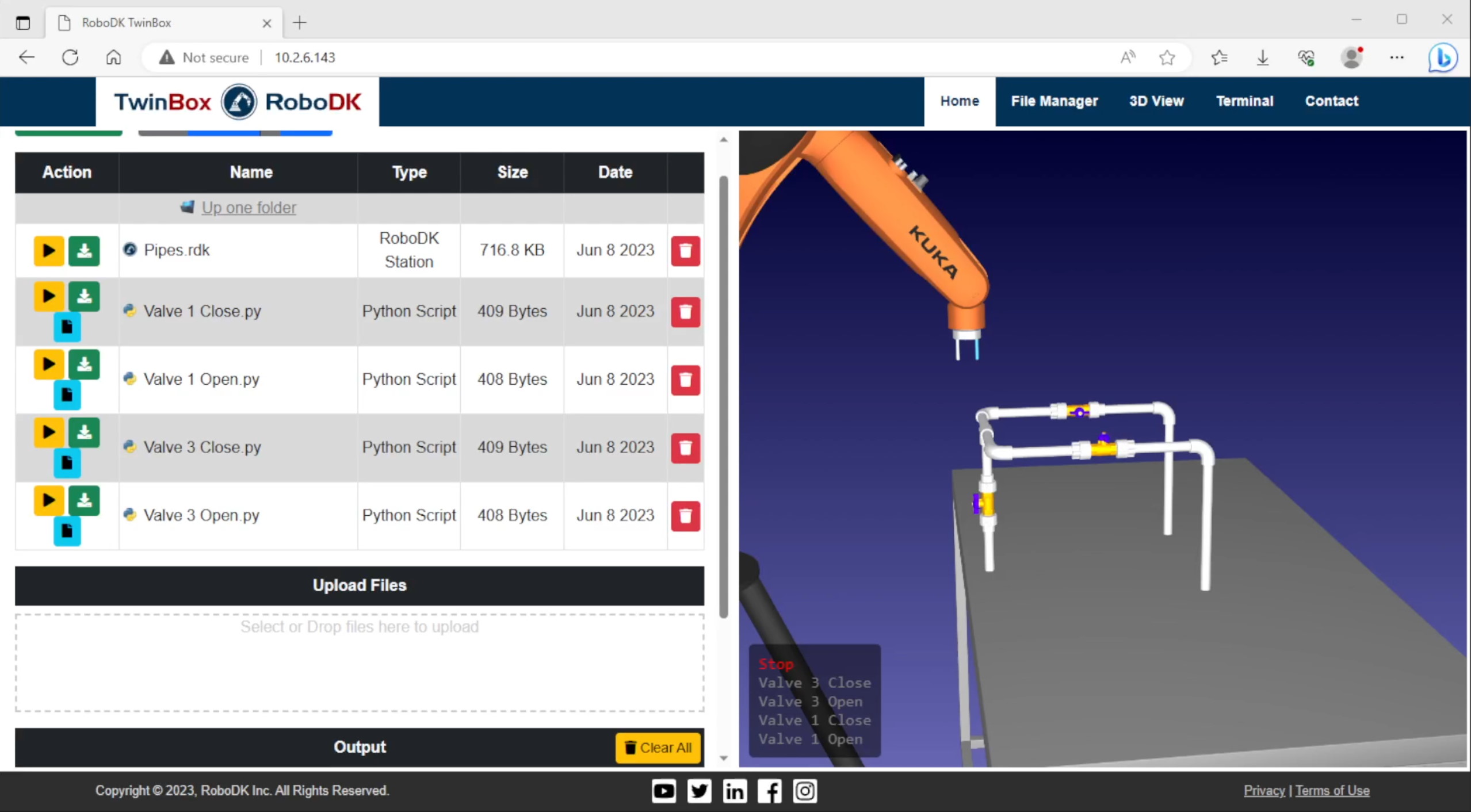
通过网络浏览器控制
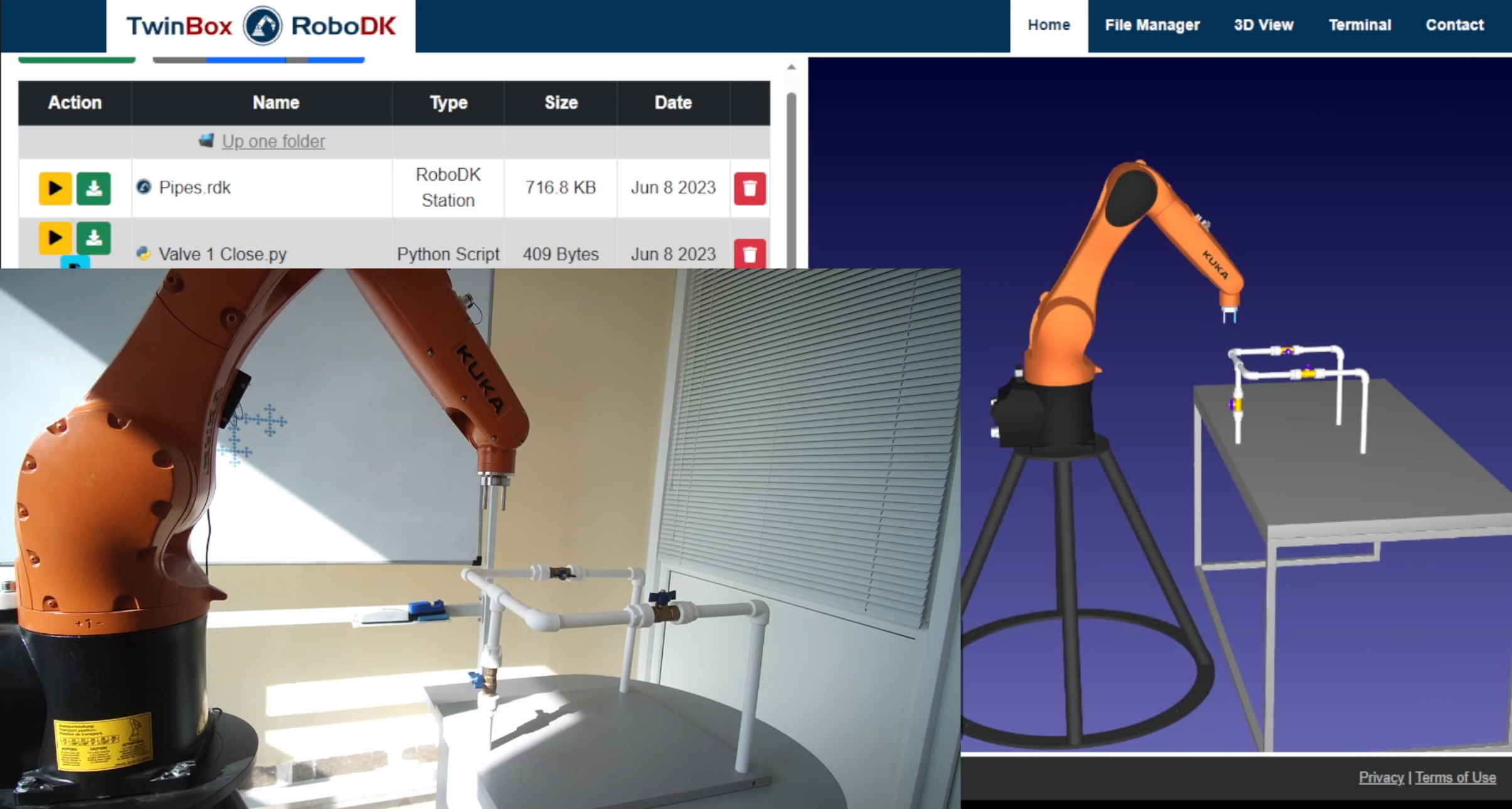
在世界任何地方实时访问
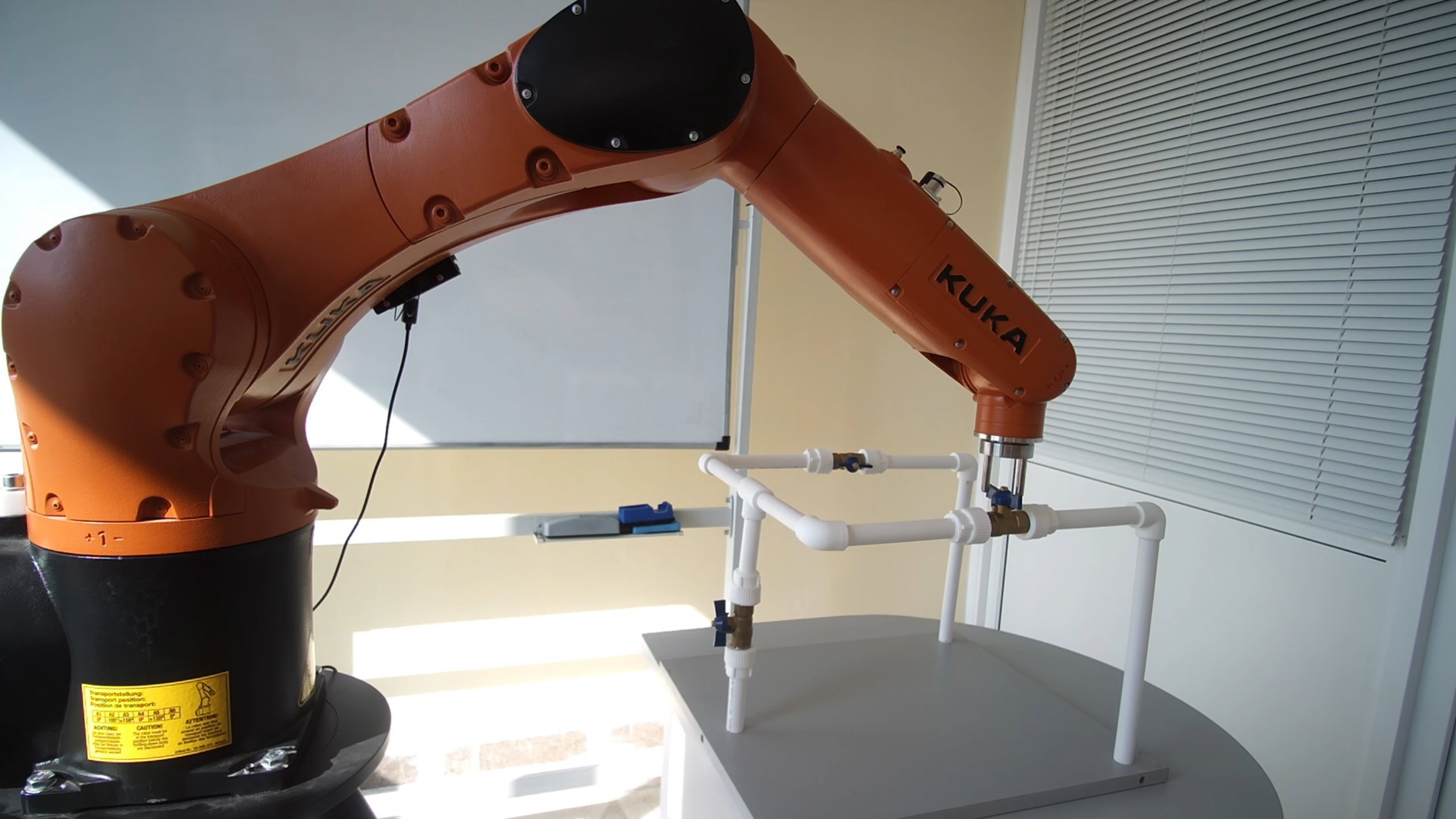
全面控制机器人、设备和传感器
体积小巧、性价比高、易于安装
包含RoboDK API功能
通过网络浏览器控制
在世界任何地方实时访问
全面控制机器人、设备和传感器
通过网络浏览器远程访问
简化空间:无需本地键盘、鼠标或显示器
连接自定义设备(相机、传感器...)
支持多个机器人
使用桌面版RoboDK创建项目
使用浏览器加载工作站
通过RoboDK TwinBox的网络界面执行机器人程序
必要时调整程序
支持多种操作系统:Windows、Linux Debian或Ubuntu
系统要求:英特尔x86-64平台,ARM
专用构建版本:Nvidia Jetson、Raspberry Pi